
【2026 AI硬件开发学习必看系列】快速通过MCP让你的桌面宠物学会摇尾巴(语音控制舵机)
内容提要
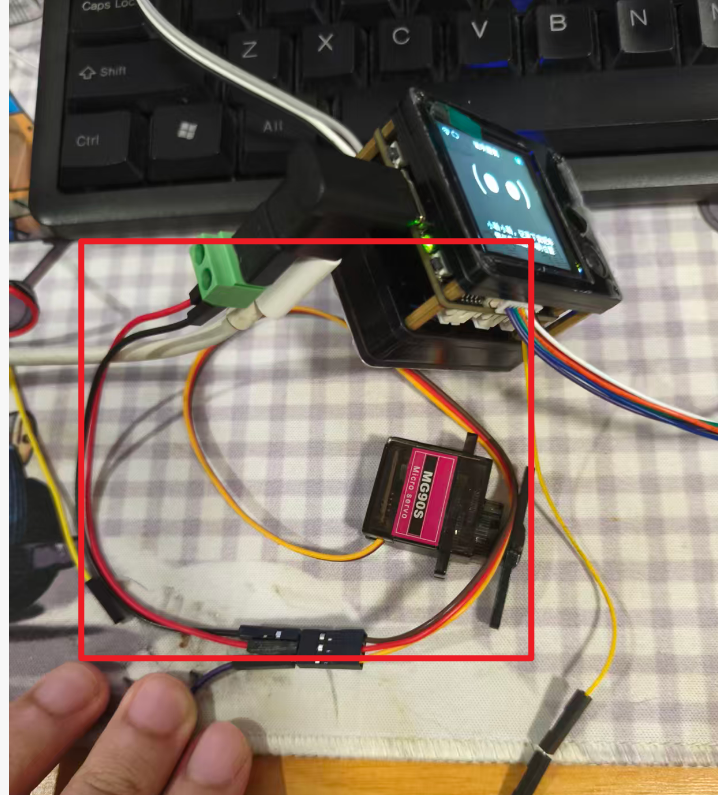
本文介绍了如何使用MCP工具通过语音指令控制LS26(Arcs-mini)开发板上的MG90S舵机。用户可以通过四次点击按钮启动或停止舵机旋转,并通过云端调用MCP工具设置旋转方向和速度。教程包括硬件接线、代码实现及常见问题解决方案,适合初学者。
关键要点
-
本文介绍如何使用MCP工具通过语音指令控制LS26(Arcs-mini)开发板上的MG90S舵机。
-
用户可以通过四次点击按钮启动或停止舵机旋转。
-
通过云端调用MCP工具设置舵机的旋转方向和速度。
-
教程包括硬件接线、代码实现及常见问题解决方案,适合初学者。
-
硬件接线要求舵机信号线接到GPIOA06,电源与主控GND共地。
-
提供了初始化舵机、启动、停止和切换功能的代码实现。
-
增加了一个云端可调用的MCP工具,用于控制MG90S舵机的旋转方向和速度。
-
常见问题包括舵机不转、方向参数错误和速度参数未传等,提供了解决方案。
延伸解读
语音控制的实用性
通过MCP工具实现语音控制舵机的功能,展示了智能硬件与自然语言处理的结合。这种方式不仅提升了用户体验,也为开发者提供了更灵活的控制手段,适合在家庭自动化和机器人项目中应用。
硬件接线的重要性
在接线过程中,确保舵机电源与主控GND共地是至关重要的。若不共地,可能导致PWM信号漂移,造成舵机无法正常工作。因此,开发者在搭建硬件时需特别注意这一点,以避免不必要的故障。
常见问题及解决方案
文章中列出了舵机不转、停不住等常见问题及其解决方案。开发者在调试时应仔细检查这些问题,确保按照文档步骤进行操作,以提高成功率。了解这些常见问题可以帮助新手更快上手。
延伸问答
如何通过语音控制MG90S舵机的旋转?
用户可以通过MCP工具发出语音指令,如“电机顺时针旋转”,来控制MG90S舵机的旋转方向和速度。
如何启动和停止舵机旋转?
用户可以通过四次点击按钮来启动或停止舵机的旋转。
MCP工具的作用是什么?
MCP工具用于通过云端控制MG90S舵机的旋转方向和速度,简化了智能硬件的控制过程。
如何连接MG90S舵机的硬件?
MG90S舵机的信号线应连接到GPIOA06,电源与主控GND需共地,以确保正常工作。
常见问题中舵机不转的解决方案是什么?
检查是否正确执行了service_mg90s_init(),确保舵机电源与主控共地,并查看日志是否有错误信息。
如何编译和烧录新的固件?
在工程根目录执行编译命令 ./build.sh -S ./apps/arcs-mini/,然后使用cskburn将生成的固件烧录到指定地址。
