
RoboTAP笔记
原文中文,约900字,阅读约需2分钟。
📝
内容提要
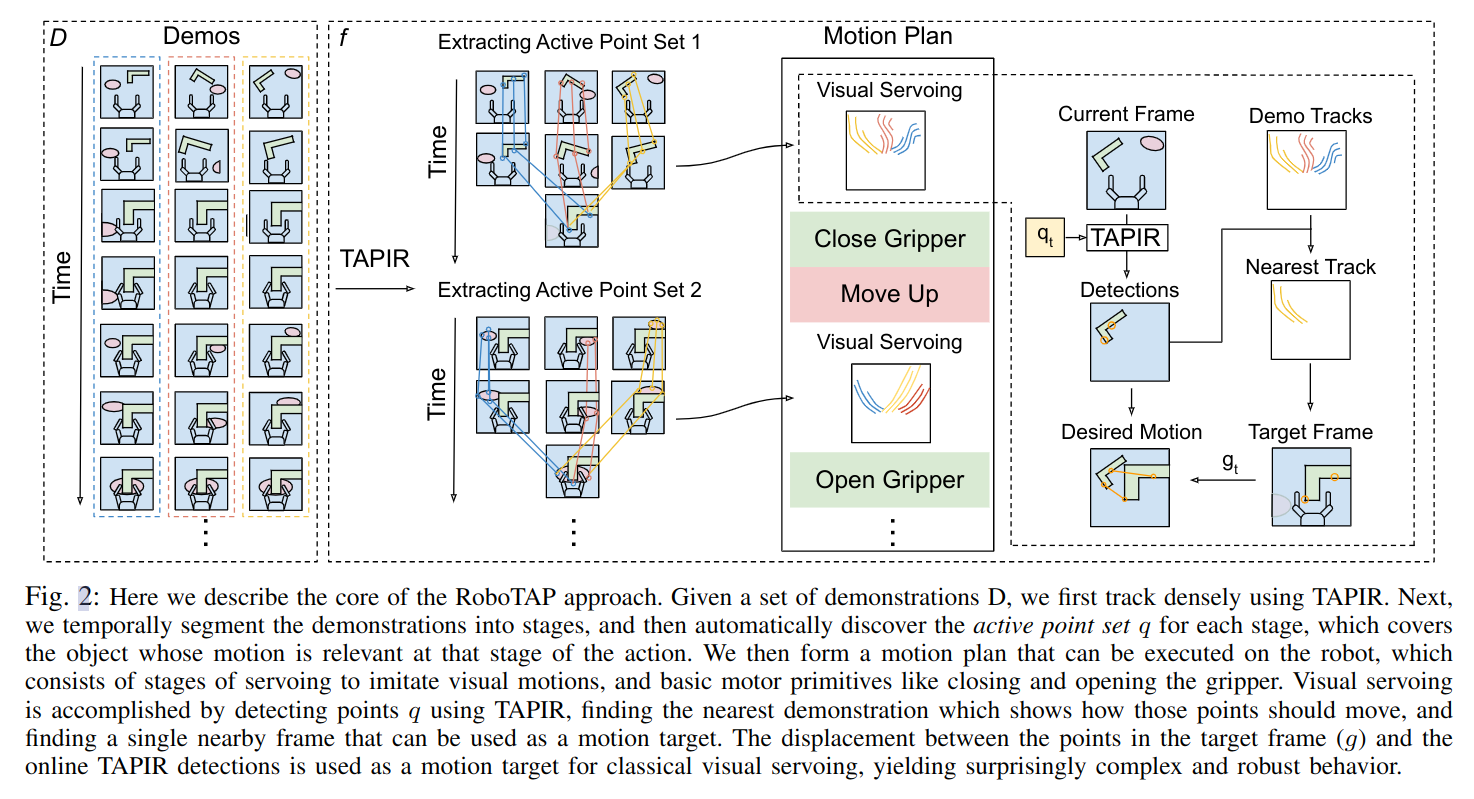
RoboTAP是一种基于点追踪技术的少样本视觉模仿方法,可以实现机器人在多个任务和场景中的精准操作。它不需要特定于任务的训练或神经网络微调,可以快速添加新任务。作者提出了四个贡献,包括制定多任务操作问题、解决方法、新的密集跟踪数据集和实证结果。RoboTAP的核心是利用TAPIR密集地跟踪演示,并自动发现每个阶段的活动点集,然后形成机器人上的运动计划。通过视觉伺服,实现精确的行为。
🎯
关键要点
-
RoboTAP是一种基于点追踪技术的少样本视觉模仿方法,能够实现机器人在多个任务和场景中的精准操作。
-
RoboTAP不需要特定于任务的训练或神经网络微调,添加新任务只需几分钟。
-
RoboTAP在快速教授视觉运动技能和轻松演示所需行为的情况下最为有效。
-
RoboTAP存在一些限制,如低级控制器仅依赖视觉,缺乏复杂的运动规划或力控制。
-
作者提出了四个贡献,包括制定多任务操作问题、解决方法、新的密集跟踪数据集和实证结果。
-
RoboTAP的核心是利用TAPIR密集跟踪演示,自动发现每个阶段的活动点集,并形成运动计划。
-
通过视觉伺服,RoboTAP能够实现精确的行为,模仿视觉运动和基本的电机原语。
🏷️
