
C# 工业巡检系统:集成海康摄像头、轨道机与 OpenCV 的实战方案
内容提要
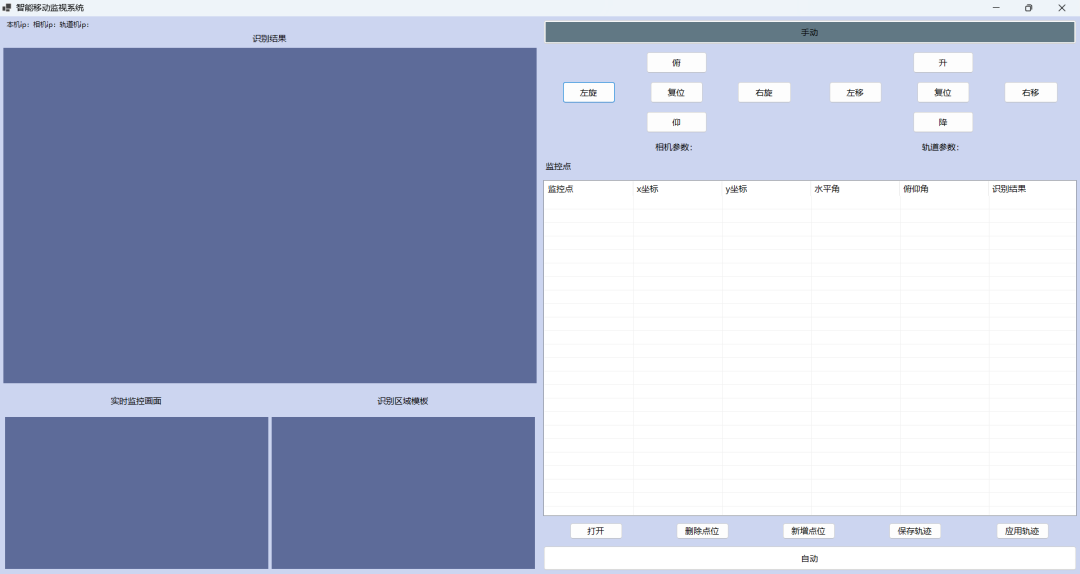
该项目基于C#开发,利用海康摄像头实现灯具的自动巡检,支持手动和自动模式,具备实时图像处理和异常报警功能。通过TCP/IP协议与轨道机通信,并结合OpenCV进行灯色识别,以提高巡检的效率和准确性。
关键要点
-
人工巡检效率低,容易遗漏细节,需利用摄像头自动巡检灯具状态。
-
项目基于C#开发,集成海康SDK,实现摄像头控制与图像处理。
-
系统支持手动和自动巡检模式,实时捕获图像并分析灯色状态。
-
采用OpenCV的HSV阈值分割算法,精准识别灯状态并生成检测报告。
-
通过Socket实现摄像头与轨道机的联动控制,确保巡检路径精准复现。
-
系统具备异常报警机制,发现异常时自动触发报警并标注问题。
-
项目特点包括跨设备协同、内存优化、模块化设计和工程化实践。
-
使用WinForm桌面应用,结合OpenCVSharp库进行图像处理。
-
多线程技术用于分离UI交互、视频处理与自动巡检逻辑,避免界面卡顿。
-
项目源码支持快速搭建与二次开发,包含详细注释与运行说明。
延伸解读
自动巡检的优势
传统人工巡检效率低且容易遗漏细节,而该系统通过海康摄像头实现灯具的自动巡检,能够实时捕获和分析图像,显著提高巡检的效率和准确性。这种自动化手段不仅节省了人力成本,还能及时发现并报警异常,提升了工业现场的安全性。
技术实现的复杂性
该项目涉及多个技术环节,包括视频采集、图像识别和设备联动等。通过C#与OpenCV的结合,系统能够精准识别灯具状态并生成检测报告。这种复杂的技术实现要求开发者具备较强的编程能力和对工业设备的理解,确保系统的稳定性和可靠性。
多线程技术的应用
项目中采用多线程技术来分离UI交互、视频处理与自动巡检逻辑,避免了界面卡顿的问题。这一设计不仅提升了用户体验,也确保了系统在长时间运行中的稳定性,适合在工业环境中应用。
延伸问答
C#工业巡检系统的主要功能是什么?
该系统支持手动和自动巡检模式,实时捕获图像并分析灯色状态,发现异常时自动报警。
如何实现摄像头与轨道机的联动控制?
通过Socket实现摄像头与轨道机的联动控制,支持预置点设置与轨迹记忆,确保巡检路径的精准复现。
该系统使用了哪些图像处理技术?
系统采用OpenCV的HSV阈值分割算法,精准识别灯状态并生成检测报告。
项目的开发语言和框架是什么?
项目基于C#开发,使用WinForm桌面应用和OpenCVSharp库进行图像处理。
系统如何处理异常情况?
系统具备异常报警机制,检测到灯状态异常时自动触发报警并标注问题。
该项目的源码是否支持二次开发?
是的,项目源码包含详细注释与运行说明,支持快速搭建与二次开发。
