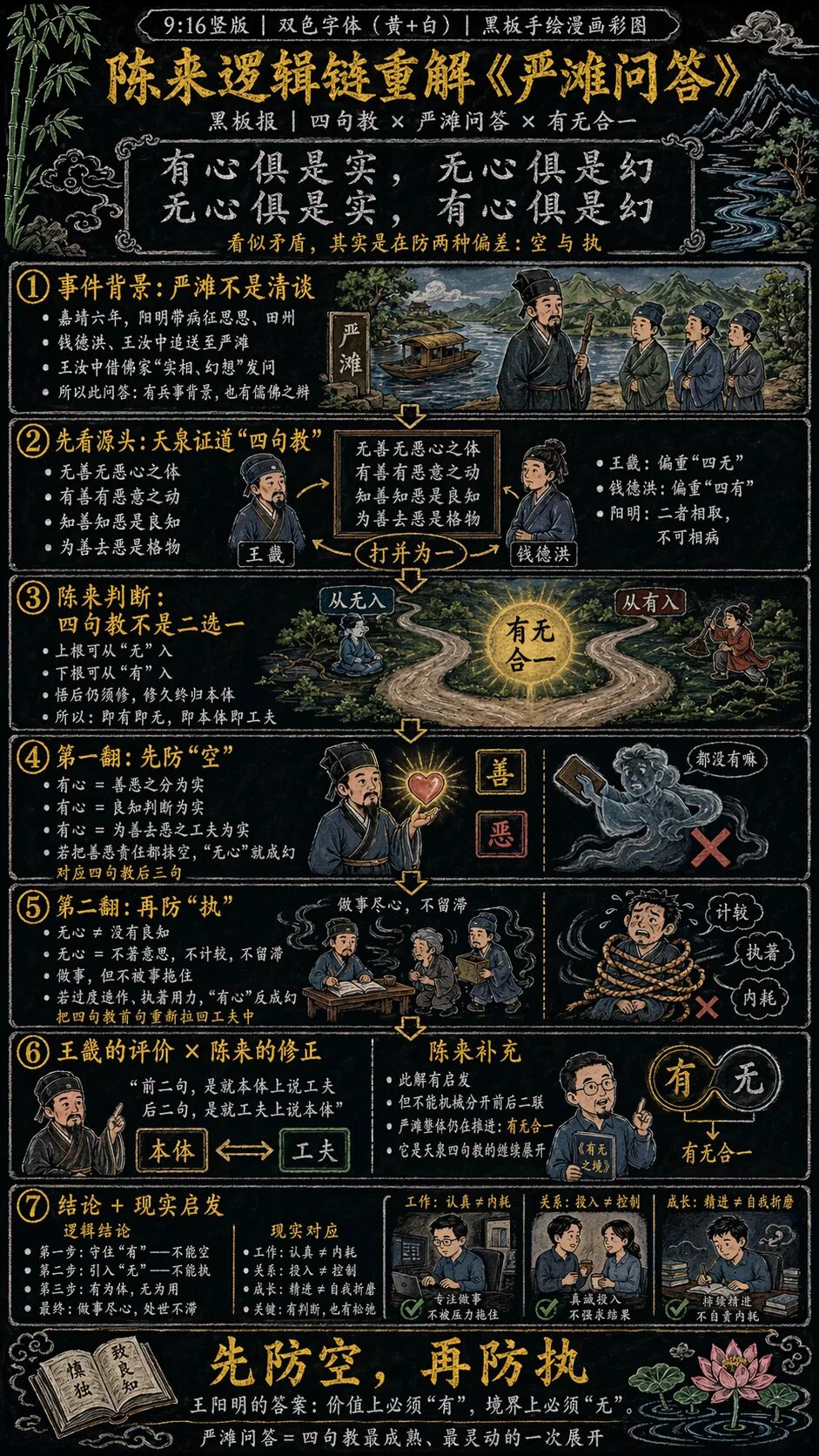
王阳明的“严滩问答”探讨了“有心”和“无心”的关系,强调在做事时要平衡善恶与责任。前两句强调“有心”的真实性,后两句则提醒“无心”的价值,避免过于执着。陈来指出,理解这四句需结合阳明的“四句教”,强调“有”和“无”的动态平衡,适用于现代人面对的工作、关系和自我成长问题。
央视春晚展示了多款人形机器人,尤其是宇树的表演引发热议。尽管技术进步显著,但有人质疑其实用性。人形机器人在复杂动作中展现了动态平衡能力,未来可能融入日常生活。对“机器人奴役人类”的担忧较少,更多关注技术问题。
阴阳是中国哲学的核心概念,象征宇宙中相互依存的对立力量。在AI基础设施中,存在扩展与约束、创新与治理、速度与稳定三对阴阳张力。平衡这些张力是系统健康运行的关键,需要根据环境变化进行动态调整。
本文提出了“阴阳-五行-运-气”四层模型,系统阐述了AI基础设施的理论与实践,强调动态平衡与协调,帮助架构师应对复杂性并提供决策支持。通过整合东方智慧与工程实践,推动技术与概念创新,促进AI基础设施的发展。
动易科技推出的PHYBOT M1是全球首个全尺寸电驱人形机器人,成功实现后空翻,展现出超越波士顿动力Atlas的爆发力。该机器人重近70公斤,旨在验证人形机器人在动态平衡和高强度环境中的潜力,推动机器人技术向“超人类”发展。
本研究针对大型多模态模型因信息过时而导致的性能下降问题,提出了一种新的模型编辑方法BalancEdit,旨在平衡通用性和局部性之间的权衡。通过构建专门评估这一权衡的编辑数据集OKEDIT,BalancEdit引入了一种独特机制,以精确确定信息的影响范围,从而在不改变模型权重的情况下,实现有效的知识编辑。该方法的有效性得到了全面验证,显示出在保持强大编辑能力的同时,能够实现最小的权衡损失。
本文介绍了四足机器人运动控制的多种方法,包括基于模型的控制、元学习、模仿学习和增强学习。这些方法提升了机器人的动态平衡、适应能力和运动技能,使其能够在复杂环境中灵活运动。研究表明,通过快速数据生成和有效学习策略,机器人在不同任务中的表现显著提升。
完成下面两步后,将自动完成登录并继续当前操作。