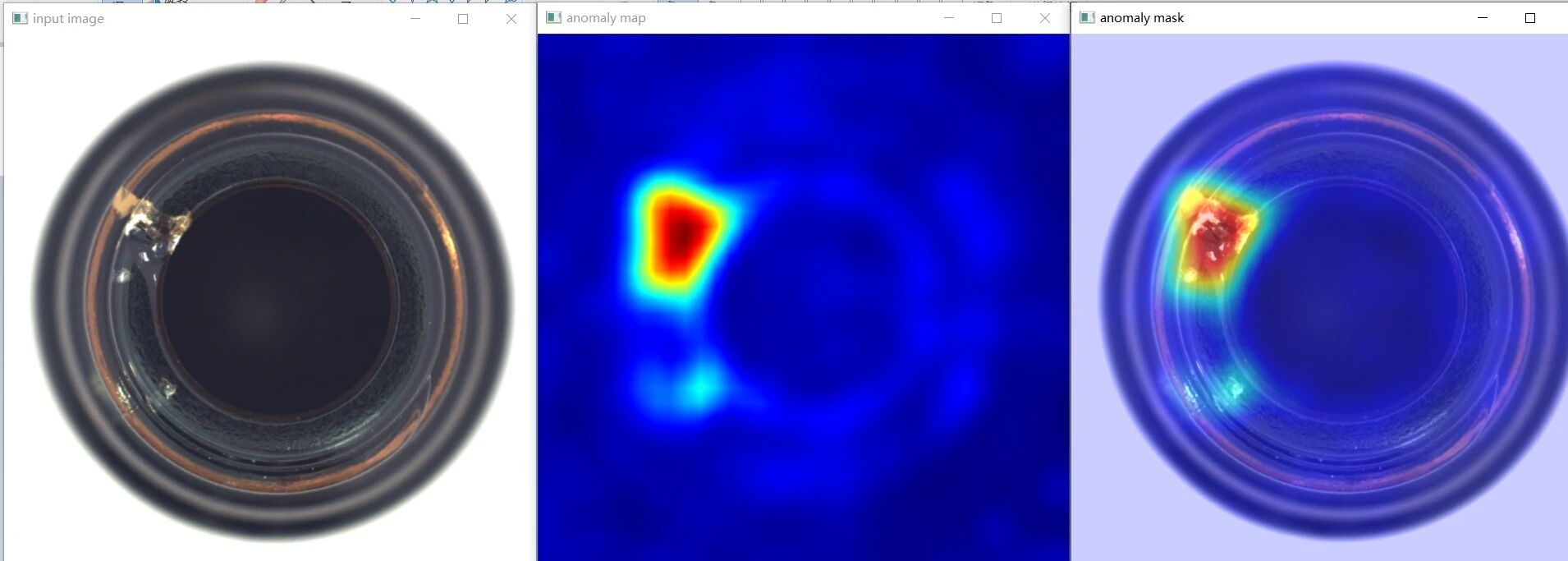
NVIDIA 最近推出了视觉语言定位模型LocateAnything-3B,拥有30亿参数,支持多种视觉定位任务。其核心创新为并行框解码(PBD),显著提升了定位精度和解码速度,尤其在复杂场景下表现优异,推动了视觉定位技术的发展。
文章讨论了工业缺陷检测的三个阶段:第一阶段为CNN分类与分割,主要解决缺陷识别,但在复杂环境中效果不佳;第二阶段为异常检测与小样本学习,强调理解正常状态以识别未知缺陷;第三阶段为多模态零样本质检智能体,旨在实现零漏检和低误检,通过大模型和工艺知识库提升检测能力。未来工业检测需向第三阶段演进。
字节Seed推出的M3-Agent多模态智能体具备长期记忆和实时感知能力,通过强化学习提升推理效果,优于现有模型。M3-Bench基准评估其在长视频理解中的表现,展现出卓越的跨模态推理能力。
美国东北大学与波士顿动力RAI联合提出的HEP框架,通过坐标系转移接口实现机器人高效学习。该框架的分层结构提升了灵活性,自动适应空间变化,显著降低了数据依赖。实验结果显示,HEP在复杂任务中的成功率提升了60%,为未来多模态智能体集成提供了新路径。
MetaAgentX团队推出了Open CaptchaWorld平台,旨在评估多模态智能体在解验证码方面的能力。研究表明,尽管人类的成功率高达93.3%,但最先进的模型如GPT-4o的成功率仅为40%,显示出当前智能体在高交互场景中的不足。该平台旨在促进智能体在真实网页任务中的应用与发展。
本文探讨了多模态智能体在设计生成和用户界面代码自动化方面的研究进展。研究表明,GPT-4V在视觉设计转代码任务中表现优异,但多模态模型在真实环境中完成复杂任务仍面临挑战。提出的Sketch2Prototype框架有效提升设计探索,UGround模型显著改善了GUI代理的环境感知能力。
CRAB是一个跨平台多模态智能体基准测试框架,由CAMEL AI社区开发。它评估多模态语言模型智能体在跨环境任务中的表现,并提供了高效的任务和评估器构建工具。研究团队还开发了一个包含100个任务的跨平台测试数据集CRAB Benchmark-v0。实验结果显示,使用GPT-4o作为推理引擎的单智能体结构具有最高的测试点完成率。该框架为智能体评估提供了全面、灵活和贴近实际的基准测试平台。
联汇科技发布了第二代多模态智能体OmAgent,感知模块升级,速度提高20倍以上。思考决策能力提升,发布了第二代思考大模型OmChat V2,支持多种复杂输入。OmAgent框架全面开源,构建开放、丰富的智能体生态。发布了空间运营智能体和知识服务智能体,为行业用户提供助手。
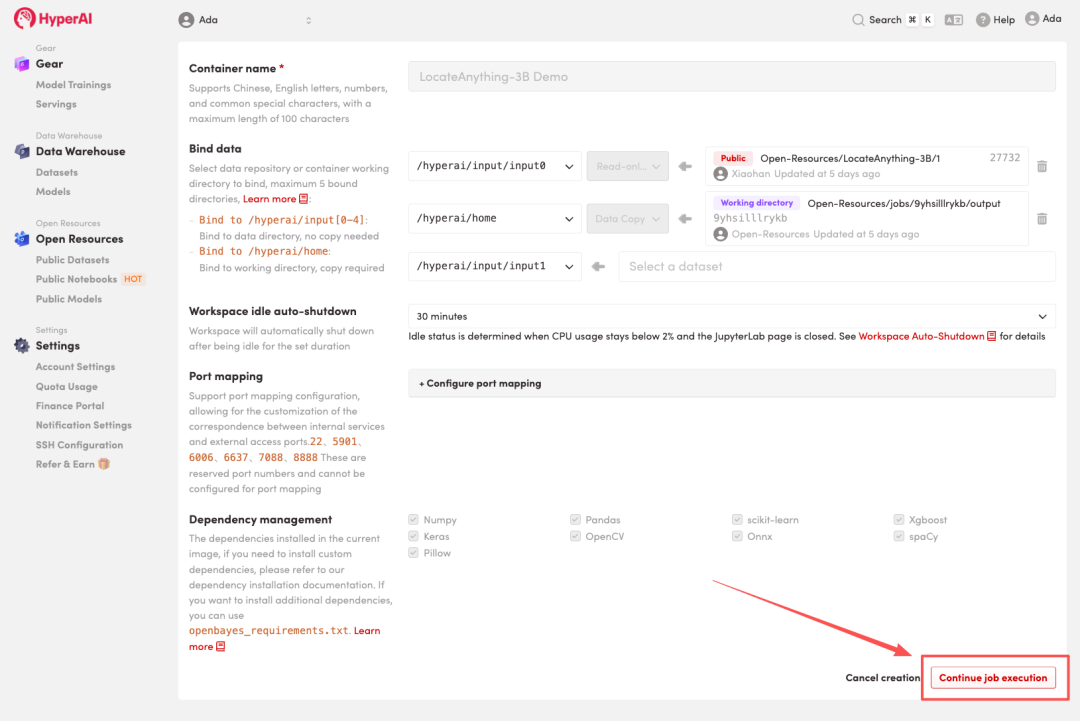
完成下面两步后,将自动完成登录并继续当前操作。