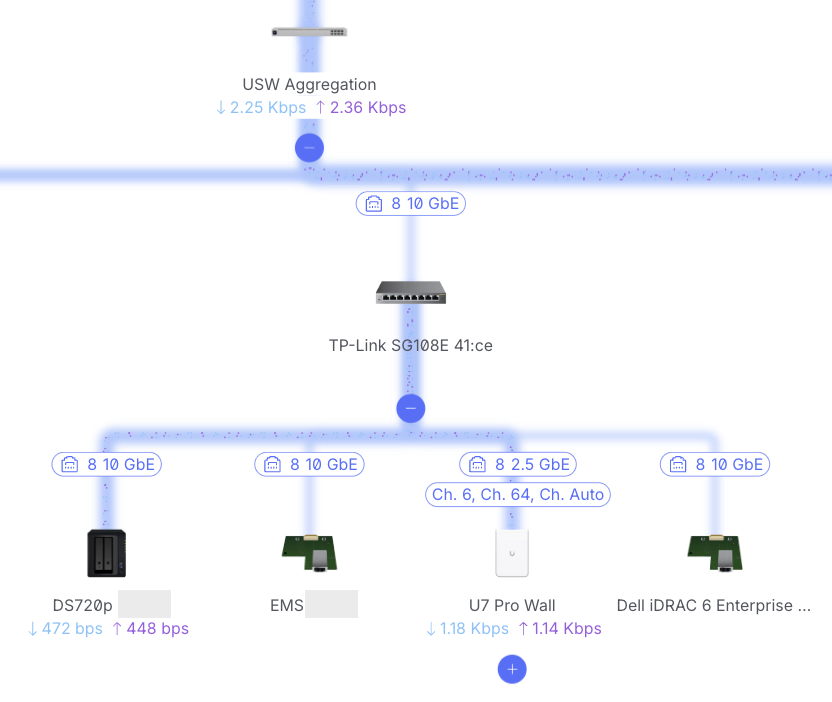
本文讨论了UniFi网络设备的拓扑图显示问题,指出购买官方AP和交换机的高成本。虽然UniFi支持LLDP协议,能够显示部分第三方设备,但功能有限。通过安装lldpd软件,Linux宿主机的虚拟机拓扑也能正确显示。
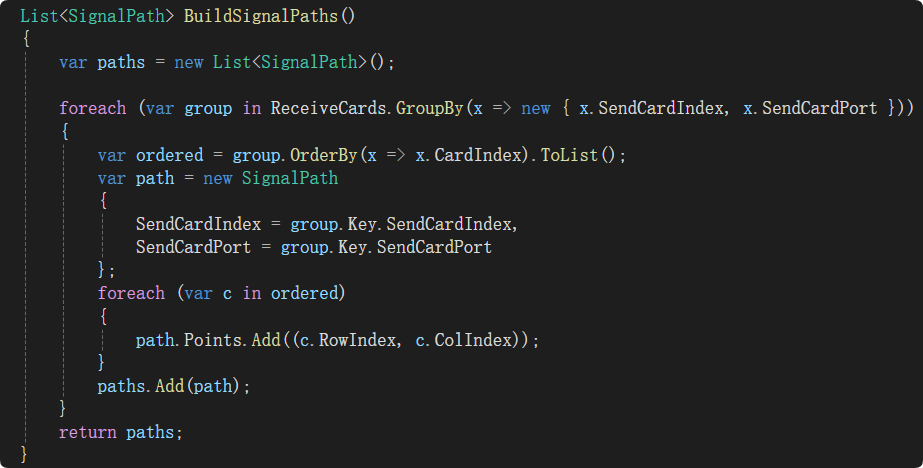
本文介绍了在Blazor中实现简单拓扑图的过程,包括绘制网格、填充数据、连接信号线和页面导航。作者希望探索更复杂的效果,并鼓励读者交流。
本文介绍了一种多模态变长记忆转换器(MTVM)方法,提升视觉和语言导航的性能。在R2R和CVDN数据集上的评估显示,成功率提高了2%,并减少了目标处理时间。此外,研究提出了具有身体感知的语言模型(VELMA),成功率提高了25%-30%。这些方法有效增强了导航能力和可解释性,为未来的导航研究提供了新方向。
研究人员提出了一种新颖的拓扑图神经网络(TTG-NN),利用持久同调、图卷积和张量运算构建了一种简单而有效的拓扑深度学习方法。实验结果表明,TTG-NN在各种图基准数据上表现优于其他20种最先进的方法。
该文介绍了一个完整的对象感知SLAM系统,包括多级验证的对象级数据关联方法和基于二次曲面对象地图拓扑结构的语义闭环方法。作者验证了该系统的有效性、稳健性和优越性。
完成下面两步后,将自动完成登录并继续当前操作。