训练世界模型,开始从人类的肌肉和脑子里偷师了
量子位
·

戴盟机器人与中国移动共同启动”数采进家庭”网络建设
全球TMT-美通国际
·

Mavrix在劳德代尔堡设立美国新总部
全球TMT-美通国际
·

工业设备数据采集太难?这款.NET8边缘网关,轻松搞定多协议对接
dotNET跨平台
·
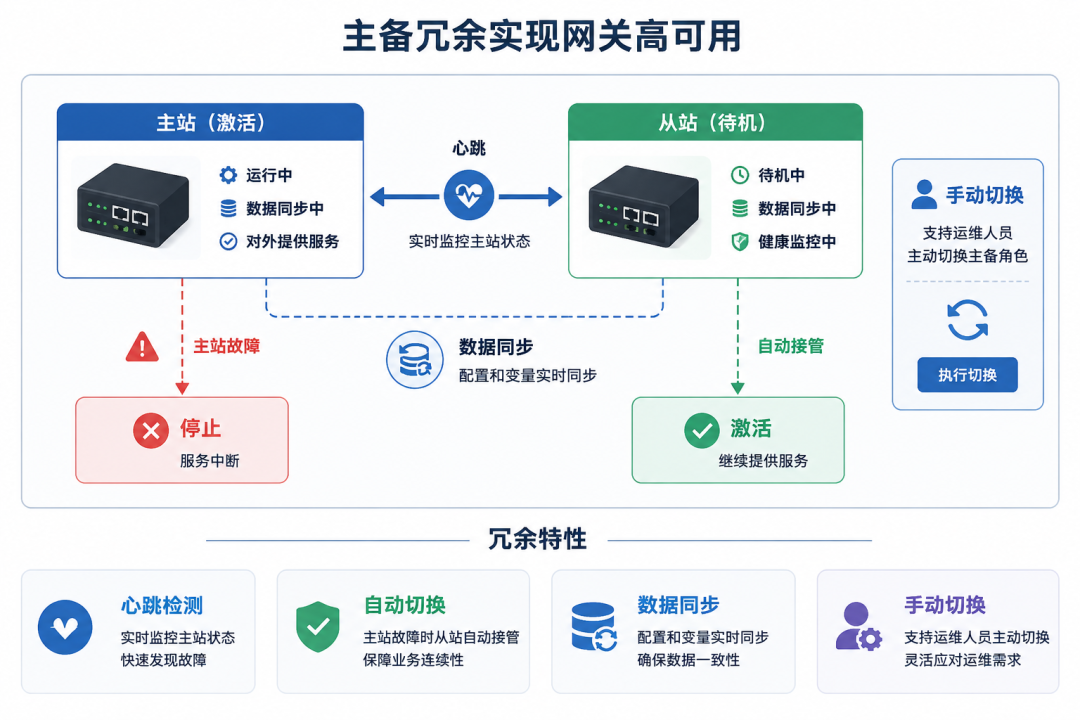
使用.Net10开发的新一代工业物联网边缘网关平台
dotNET跨平台
·

开普勒机器人完成亿元级A++轮融资,将推出力触VTLA数采方案
全球TMT-美通国际
·

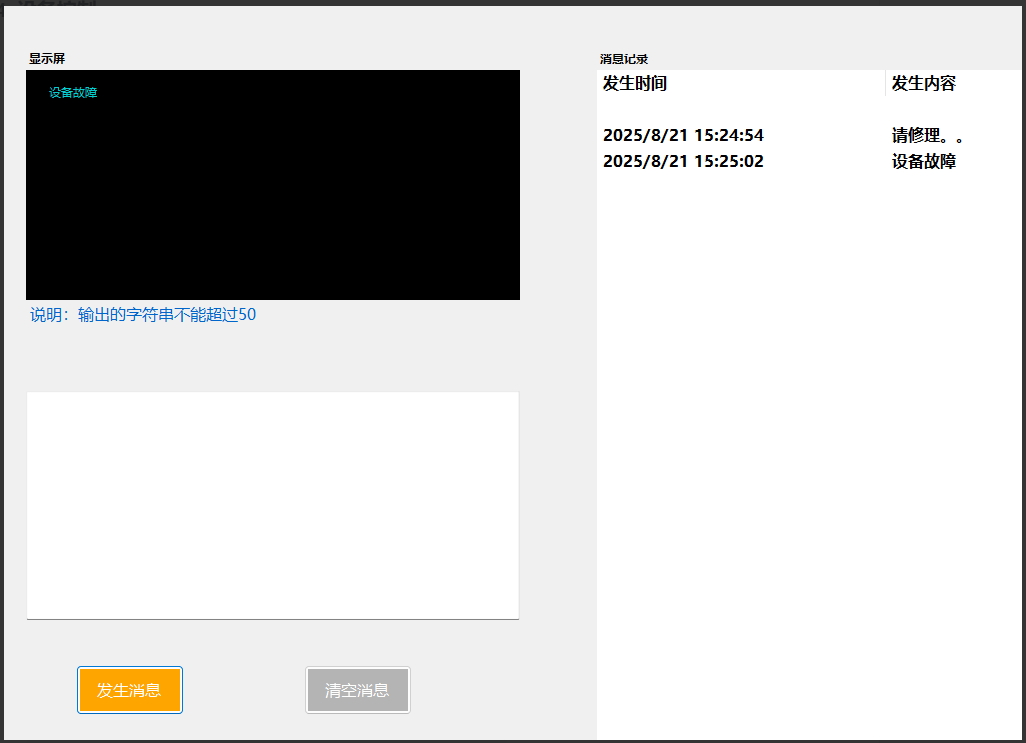
WPF + Modbus 打造轻量级工业数据采集与监控系统
dotNET跨平台
·
C# 实现桌面数据自动采集:截屏 + OCR + 实时转发
dotNET跨平台
·
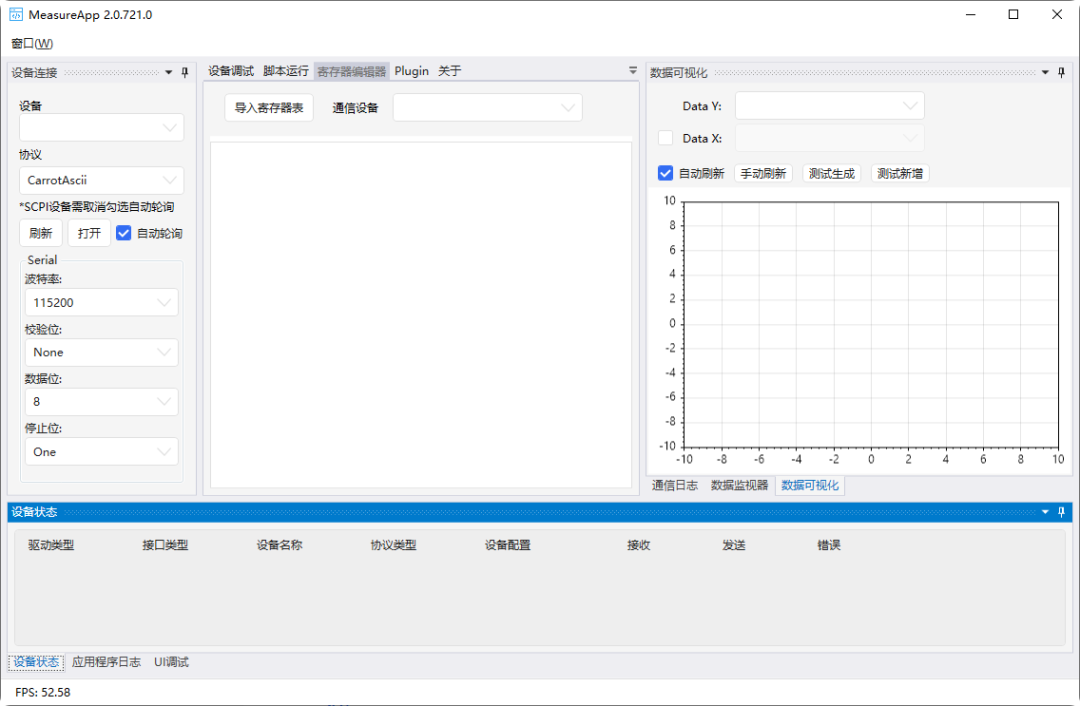
WPF 实现硬件测试全流程:连接、采集、分析、绘图
dotNET跨平台
·

推荐一个基于 .NET 的开箱即用的多平台爬虫库
dotNET跨平台
·