



软通动力发布专为制造业打造的“软通数智本体平台”
全球TMT-美通国际
·
本体如何帮助核能行业满足全球能源需求
Databricks
·
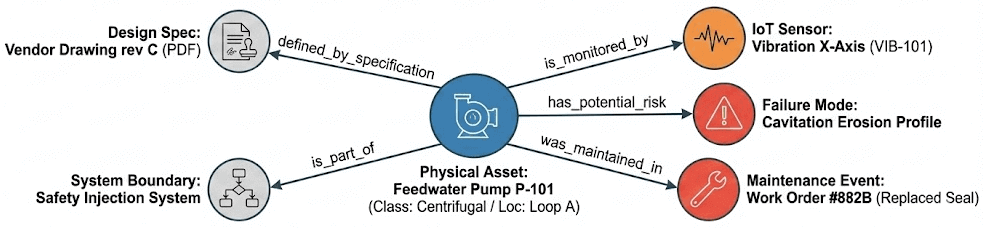
三元组描述和Ontology的关系
dotNET跨平台
·

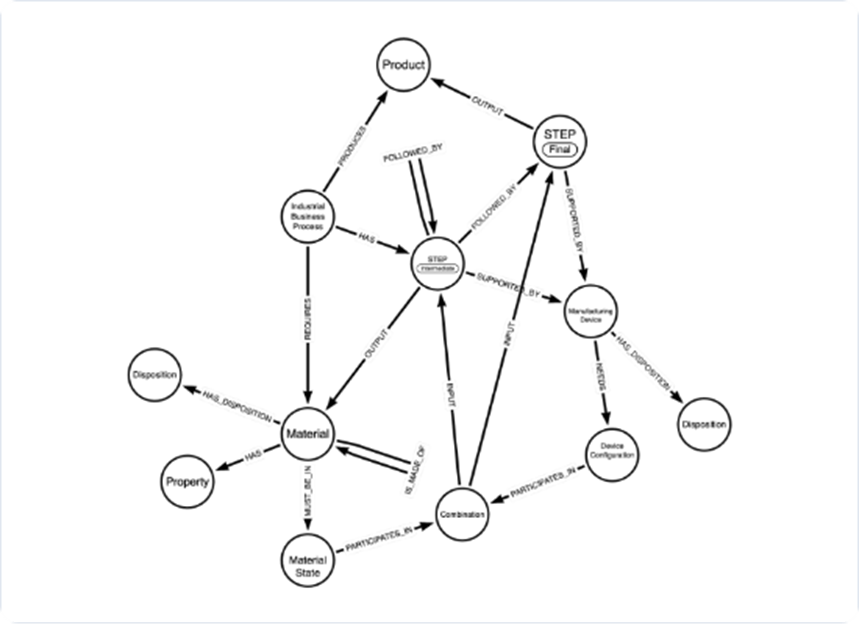
中之杰智能OAG本体模型,助力智能体在离散制造中精准行动
全球TMT-美通国际
·
用友发布以“本体”驱动的BIP企业AI本体智能体
全球TMT-美通国际
·

ODKE+: 基于本体的开放领域知识提取与大型语言模型
Apple Machine Learning Research
·
