
2026年最佳目标检测模型
The JetBrains Blog
·


Python 潮流周刊#152:编程智能体终于跨过质量门槛了?
豌豆花下猫 | Python猫
·
音视频 AI 模型进阶与实践指南
实时互动网
·
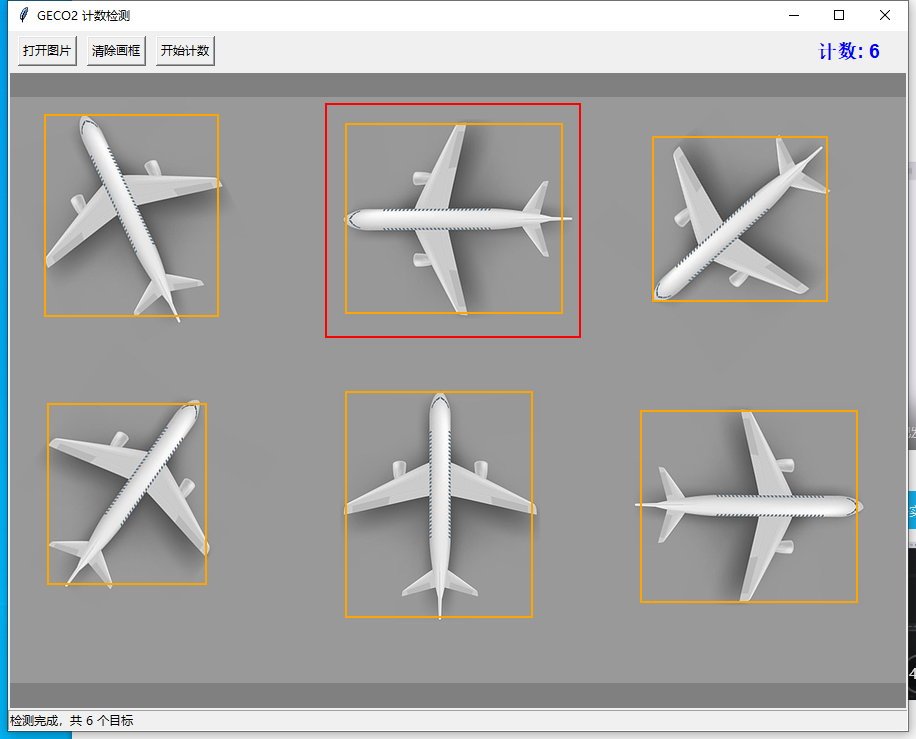
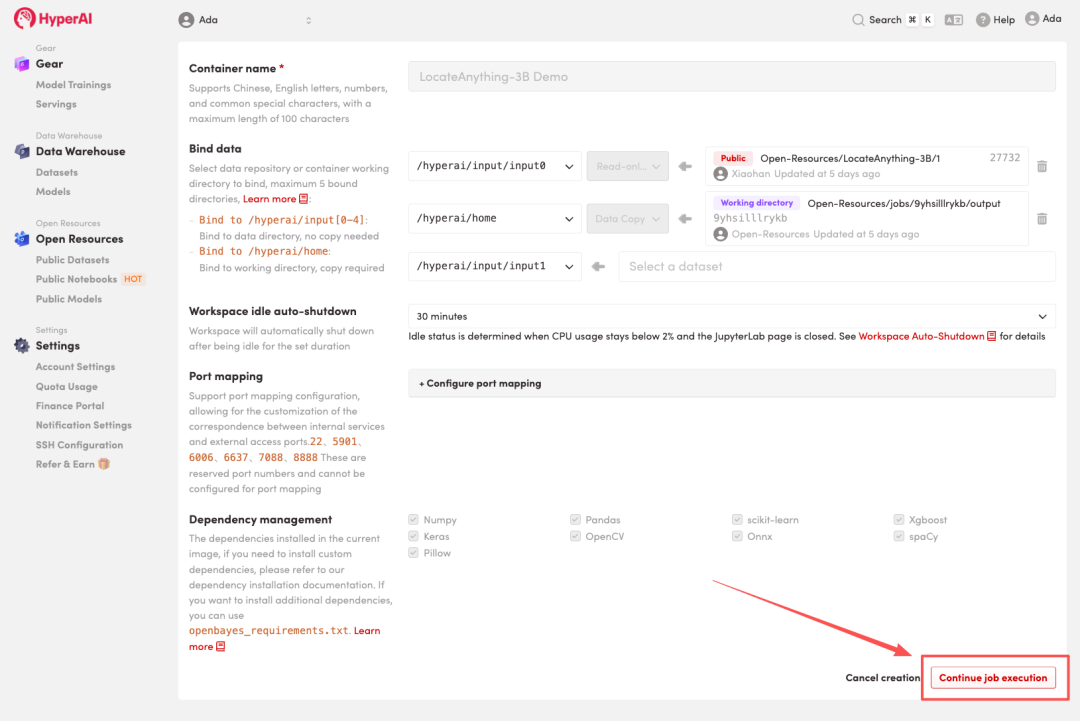
GeCo2:基于渐进式查询聚合的通用尺度目标计数模型部署实践
dotNET跨平台
·
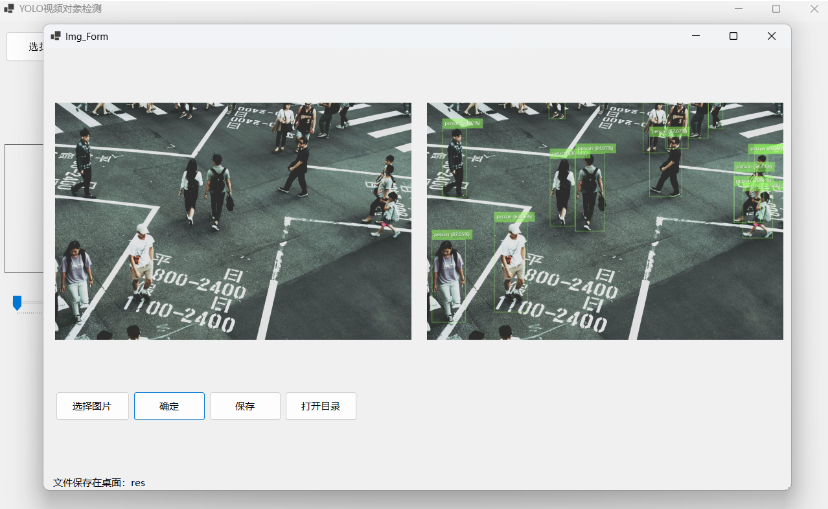
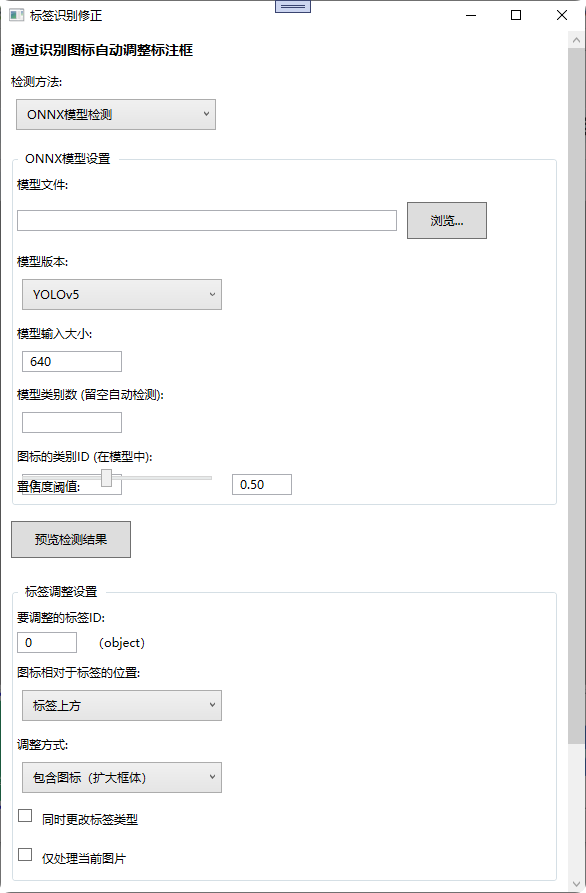
无需联网!基于 .NET + YOLO 的桌面端图像与视频目标检测实战
dotNET跨平台
·

从零部署 YOLO26:OpenVINO™ C# API 项目实战(附完整代码)
dotNET跨平台
·

YOLOv5 目标检测笔记
plus studio
·
【案例共创】基于华为开发者空间的RestNet50目标检测
华为云官方博客
·


AI 论文周报丨通用Agent开发/目标检测/开源物理推理模型……一文了解 AI 前沿动态
HyperAI超神经
·

在线教程丨目标检测迈入「全局感知」时代:清华大学等发布 YOLOv13,实现速度、精度双突破
HyperAI超神经
·

AI 论文周报丨OCR 新模型/多模态大语言模型/下一代 DNA 测序……一文了解多领域最新进展
HyperAI超神经
·
