HoloAgent-0是一个统一的具身智能体框架,旨在解决物理机器人执行中的挑战。它通过Embodied AgentOS将自然语言指令转化为可执行技能图,结合空间和时间记忆,支持任务规划、监控和故障恢复。该框架提升了机器人在复杂环境中的导航、操作和协作能力,并通过真实机器人硬件评估展示了在长时序任务中的有效性。
使用OpenAI Codex的子代理可以显著提高编程效率。通过将任务分配给不同的小AI,避免了单一AI因负担过重而出错。子代理专注于特定任务,如代码编写和安全审查,能够同时工作,节省时间。用户只需通过自然语言指令启动小AI,提升工作效率。
香港大学推出的开源AI交易助手Vibe-Trading,允许散户无需编写代码即可进行量化交易。该工具内置452个量化因子,支持用户通过自然语言指令进行策略回测和分析,并具备“影子账户”功能,实时监控用户交易行为,帮助避免情绪化决策。尽管不支持自动实盘交易,但为散户提供了与机构相当的量化研究能力。
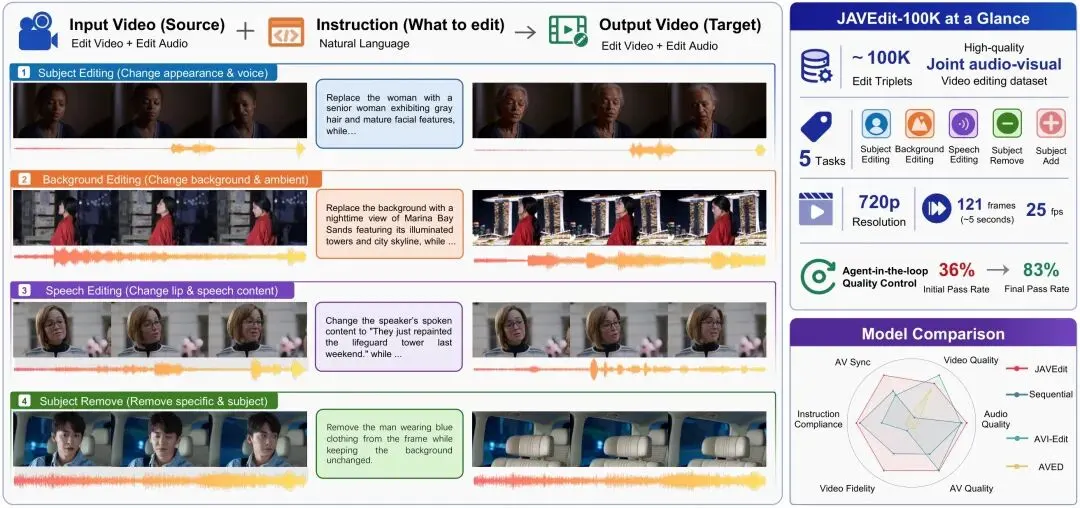
浙江大学和腾讯团队提出了JAVEdit-100k数据集及评测基准JAVEditBench,填补了音视频联合编辑的空白。研究表明,JAVEdit在评测中表现优异,音视频同步性提升26%。该工作为多模态编辑提供了高质量资源,并指出音频基础模型的不足,未来需加强音频编辑能力。
OpenCode 通过接入 Suno MCP,用户可以在终端中直接生成音乐,无需切换到浏览器。使用前需获取 Ace Data Cloud API Token,并在配置文件中设置。Suno MCP 支持生成背景音乐和歌词,适合产品发布和演示。配置完成后,用户可通过自然语言指令调用音乐生成工具。
谷歌发布了Gemini Omni视频生成模型,能够理解物理规律,用户可通过自然语言指令编辑视频。与传统AI工具不同,Gemini Omni支持多种素材融合,生成和谐视频。尽管功能强大,但在画质和流畅度上被竞争对手Seedance 2.0超越。
OpenClaw结合Chrome 144+的远程调试功能,简化了浏览器控制,用户可通过自然语言指令高效处理网页任务,无需重复登录或编写代码,特别适合需要批量操作多个网页的用户。
百度智能云推出OpenClaw一键部署服务,开发者可免费体验AI数字员工。用户通过轻量应用服务器快速部署,执行自然语言指令,提升办公效率。限时活动提供首月免费体验,降低AI应用门槛。
中国团队Hyper3D推出Rodin Gen-2 Edit,实现3D模型的局部编辑,标志着3D生成进入可编辑时代。用户可通过自然语言指令修改模型,提升3D创作效率与可控性,推动行业从“结果展示”向“可迭代工作流”转变。
智谱AI推出手机端智能助理框架Open-AutoGLM,利用视觉语言模型实现屏幕内容的深度理解与自动化操作。用户可通过自然语言指令完成任务,系统确保安全性并支持远程调试,已覆盖50余款主流应用,逐步成为全场景智能助手。
DroidRun是一个开源自动化框架,支持通过自然语言指令驱动移动设备,适用于自动化测试和移动助手。它结合自然语言理解、检索与设备控制,实现灵活的端到端自动化,便于集成与扩展。
本文介绍了Uni-NaVid,一个基于视频的多任务具身导航模型。该模型结合RGB视频流和自然语言指令,能够高效生成导航动作,并通过在线token合并机制优化推理速度。Uni-NaVid支持视觉与语言导航、目标物体导航、具身问答和人类跟随等任务,研究表明其在真实环境中表现出色,具备良好的泛化能力和计算效率。
阿里推出的AI代码编辑器Qoder现已免费试用,具备强大的上下文理解能力,能够深度分析代码库并生成文档。它支持自然语言指令,自动规划开发步骤,实时展示修改内容,并学习用户的编码风格,从而提升编程效率。
本文介绍了NaVid,一个用于视觉与语言导航的新模型。NaVid通过视频输入和自然语言指令,在连续环境中导航,无需地图或深度信息。该模型结合预训练的视觉编码器和大型语言模型,实现高效的动作规划,展现出优越的泛化能力和鲁棒性,尤其在仿真到现实的应用中表现突出。
本研究提出了VeriSafe Agent (VSA),旨在提高移动GUI代理执行指令的可靠性。通过将自然语言指令转化为可验证的规范,VSA确保代理行为与用户意图一致,从而显著提升动作验证准确率和任务完成率。
Cursor AI是Anysphere Inc.开发的下一代AI集成开发环境,旨在提高程序员的编码效率。它通过自然语言指令生成代码、智能自动补全和批量重构等功能,简化开发流程,帮助开发者更快完成任务,提高代码质量,减少调试时间。
AIxiv专栏促进学术交流,报道超过2000篇内容。新任务3D意图定位(3D-IG)通过自然语言指令在3D场景中检测目标,提升人机交互。研究构建了Intent3D数据集,利用GPT-4生成意图文本,并采用IntentNet方法显著提高了意图理解和目标检测性能。
Claude Code 是由 Anthropic 开发的 AI 编程工具,能够在终端中运行,帮助开发者高效编写代码。它支持自然语言指令,自动化任务,调试和修复代码,并简化版本控制。用户需满足系统要求并通过 NPM 安装,提供 CLI 命令和交互模式,适合复杂开发任务。
Helix是首款高速控制的人形机器人,能够灵活应对复杂家庭场景。通过结合快慢系统,Helix实现高效的视觉语言理解与动作执行,支持自然语言指令,提升操作的泛化能力和效率。
Figure推出的Helix机器人能够通过自然语言指令感知、理解并抓取物品,具备高速控制和多机器人协作能力,且无需特定任务微调,展现出强大的对象泛化能力,标志着人形机器人技术的重大进步。
完成下面两步后,将自动完成登录并继续当前操作。