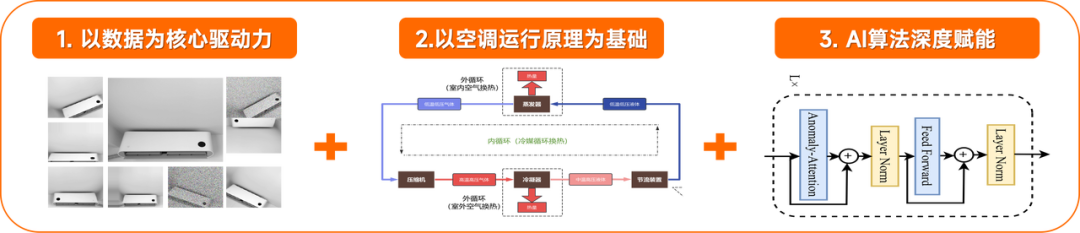
小米通过AI技术实现空调的智能化管理,包括安装、运行和维护。团队解决了安装合规性问题,提升了安装质量,并开发了AI节能控制系统,优化空调运行参数,提高能效。未来,小米将继续探索AI在空调售后服务中的应用。
本文探讨了活跃推理理论在机器人导航中的应用,利用深度学习构建复杂生成模型以处理高维传感器数据。研究提出了一种新型车辆跟随建模方法,具备灵活性和可解释性,能够有效预测驾驶控制。实验验证了主动推理在适应性、鲁棒性和决策过程中的潜力,展示了其在节能控制和工业机器人中的应用前景。
完成下面两步后,将自动完成登录并继续当前操作。