本文探讨了人形机器人在运动追踪和控制方面的进展,重点介绍了BeyondMimic和UniTracker两个项目。BeyondMimic旨在解决真实环境中的运动跟踪和sim2real迁移问题,而UniTracker通过条件变分自编码器提升运动表现力和全局一致性。这些研究为人形机器人的高效控制和应用提供了新思路。
CLIP方法用于训练视觉编码器生成图像和文本表示,但在细粒度视觉表示上有不足。本文提出CLOC方法,通过区域-文本对比损失提升CLIP的定位能力。CLOC引入可提示嵌入,设计视觉丰富的标注框架,生成大规模区域-文本伪标签,增强MLLMs在指代和定位任务中的表现。
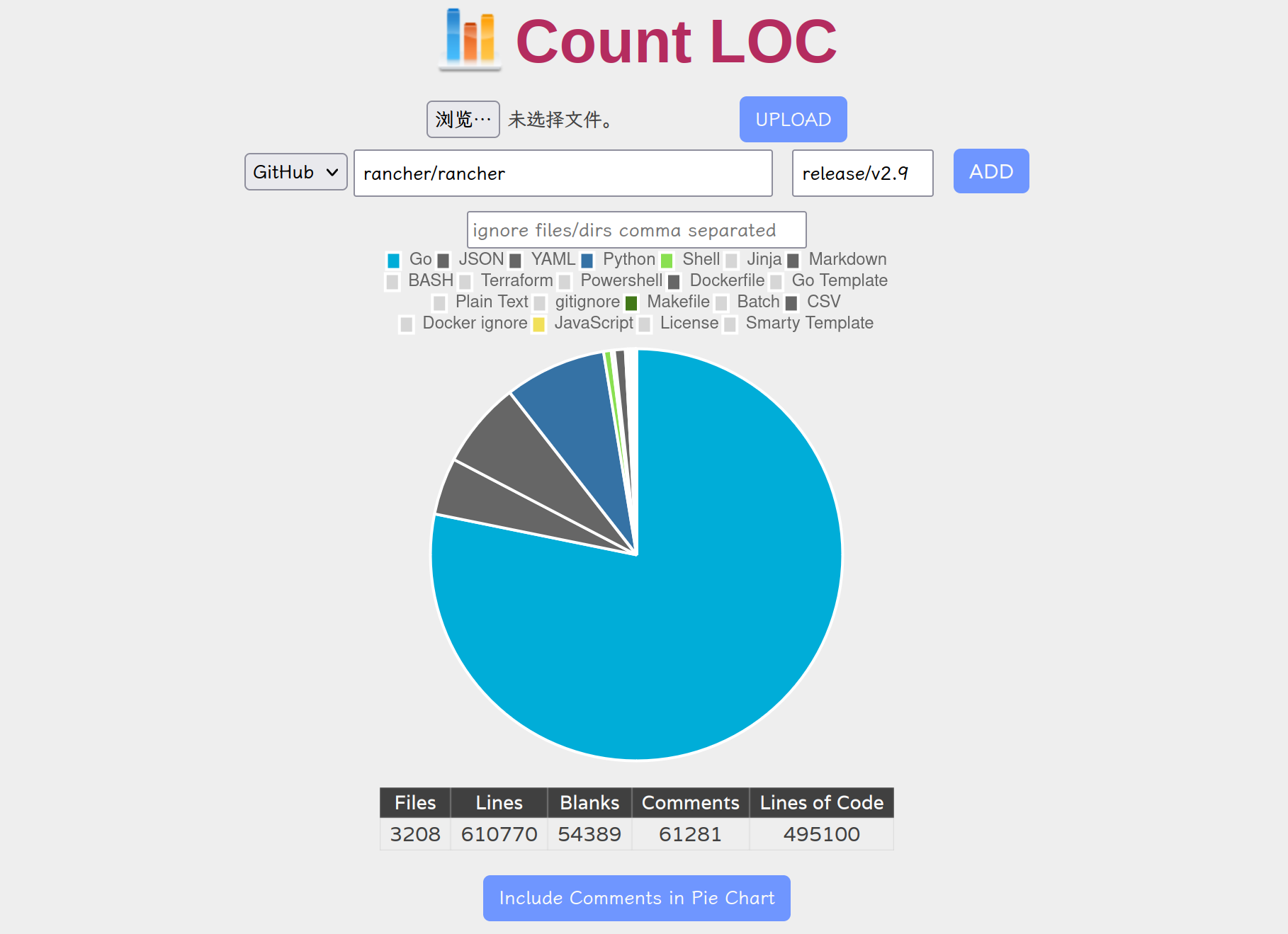
本文介绍了两种代码统计工具:在线工具和本地工具。在线工具适用于开源公共仓库,而本地工具适合私有或大型项目。推荐的本地工具包括cloc和tokei,其中tokei性能更佳。文章还列出了多种工具的特点和支持的编程语言。
背景 链接到标题 在看一个新项目的时候,通常我都会了解下这个项目的代码量,然后心里给个预期,大概需要多久了解这个项目。 2023/01/11 更新:现在已切换至 loc/tokei ,速度快了许多。 wc 链接到标题 在以前,我一般都是使用 find 配合 wc 来完成,比如: root@yiran-workstation:/tmp/cloc $ find . -name "*.go" |...
完成下面两步后,将自动完成登录并继续当前操作。