
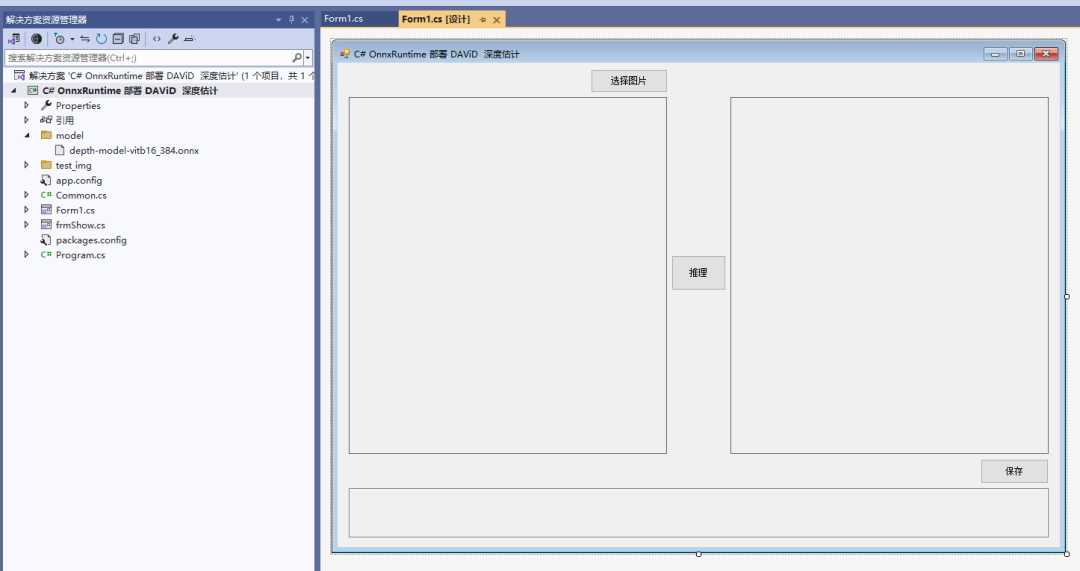
C# OnnxRuntime 部署 DAViD 深度估计
dotNET跨平台
·

倒计时5天|不卷算力卷效率|HAMi Meetup 深圳站活动报名
dotNET跨平台
·
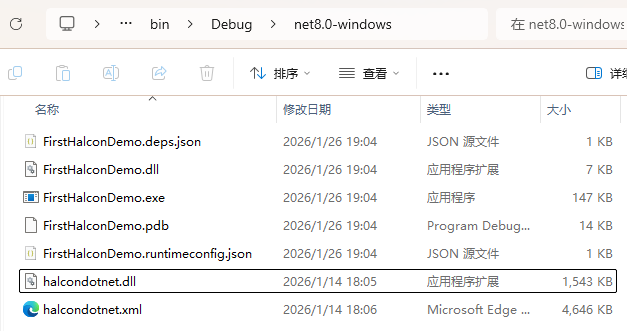
WPF/C#:创建第一个Halcon应用
dotNET跨平台
·


聊聊为什么我要花这么大精力,带大家手写 Agent Harness?
Tony Bai
·

联想Legion Go S成为RAMageddon的最新受害者
The Verge
·

繁忙的插件开发者通讯 - 2026年第一季度
The JetBrains Blog
·

约翰·特纳斯将接替蒂姆·库克成为苹果公司的首席执行官
The Verge
·

阅读蒂姆·库克致苹果世界的信件,告别首席执行官职务
The Verge
·
Postgres中的写放大:每次插入的3-4倍开销
Timescale Blog
·

苹果公司任命Johny Srouji为首席硬件官
The Verge
·

苹果首席执行官蒂姆·库克将辞职
The Verge
·
