Eclipse基金会推出企业级开源替代方案,取代微软的VS Code市场
The New Stack
·

Yelp正在大幅提升其AI聊天助手的实用性
The Verge
·
在Omacon庆祝计算机
David Heinemeier Hansson
·


DEKRA德凯2025年营收同比增长3.4%达44亿欧元
全球TMT-美通国际
·
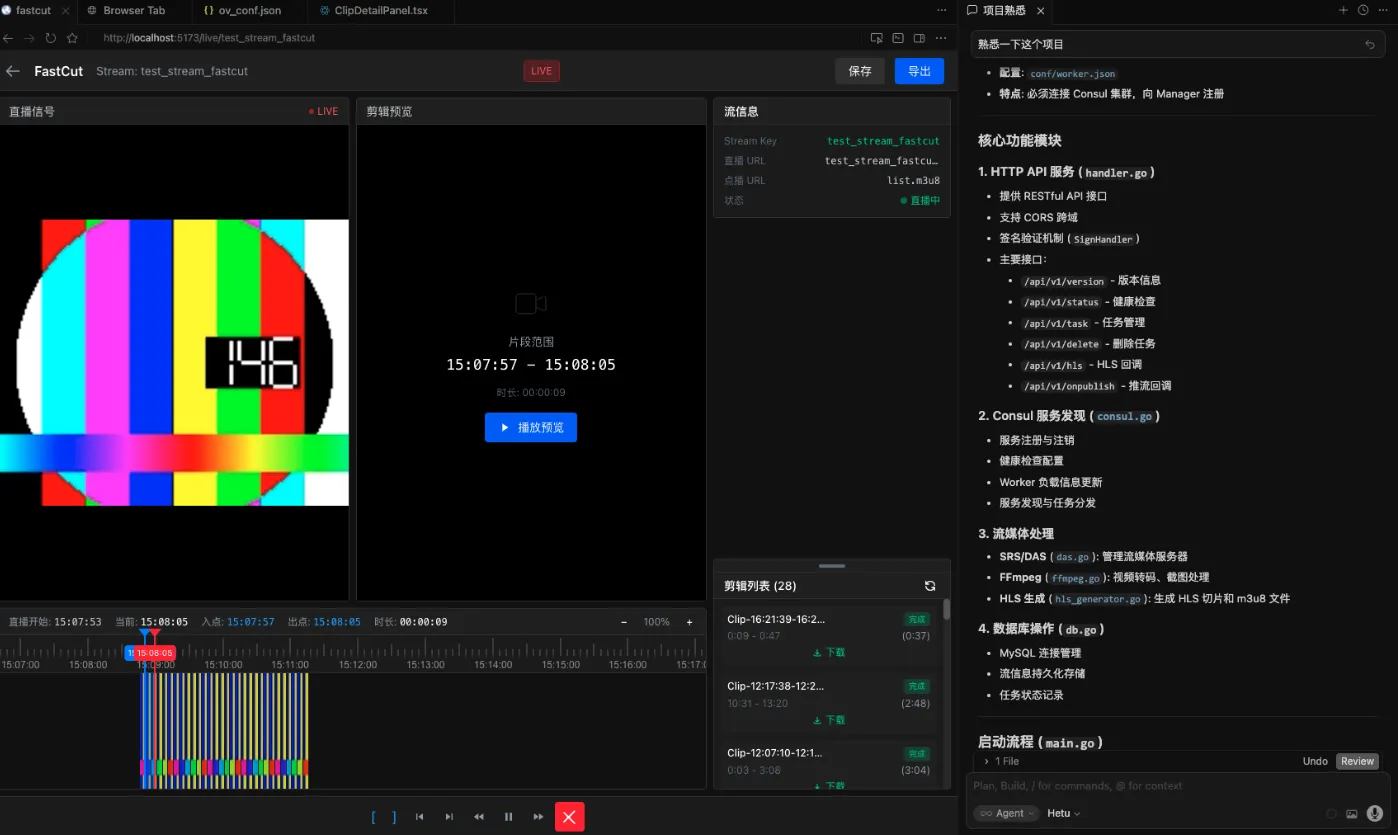
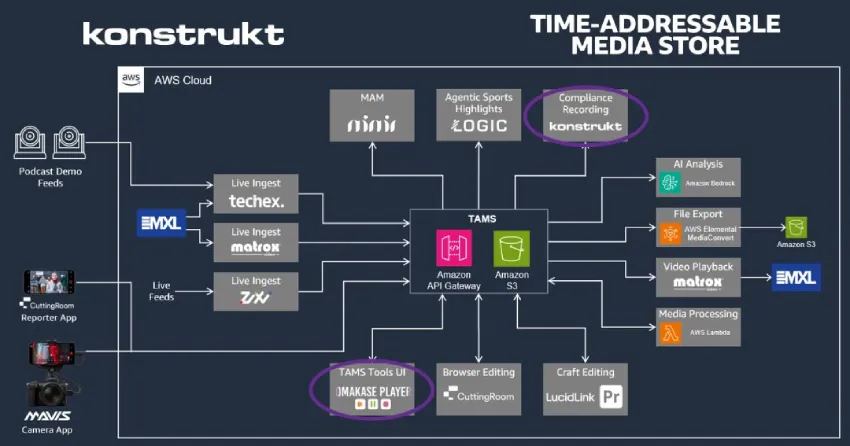
从零构建在线直播编辑分布式系统:架构设计与实现
实时互动网
·



Dematic与GreyOrange合作,进一步拓展柔性自动化能力
全球TMT-美通国际
·



海信推出新一代旗舰产品,全面提升球迷世界杯观赛体验
全球TMT-美通国际
·


Antony Pegg:如何使用 pgEdge 控制平面:从零到多主及更远
Planet PostgreSQL
·