
指令执行的目标表示
原文英文,约2000词,阅读约需8分钟。
📝
内容提要
GRIF模型通过语言与目标图像的对齐,提升了机器人执行指令的能力。它结合语言条件和目标条件的学习,利用大量未标注的轨迹数据,提高了任务执行效率。实验表明,GRIF在多场景下表现优异,能够有效理解和执行复杂指令,克服了传统方法的局限性。未来可探索更丰富的语义对齐方法。
🎯
关键要点
-
GRIF模型通过语言与目标图像的对齐,提升了机器人执行指令的能力。
-
GRIF结合语言条件和目标条件的学习,利用大量未标注的轨迹数据,提高了任务执行效率。
-
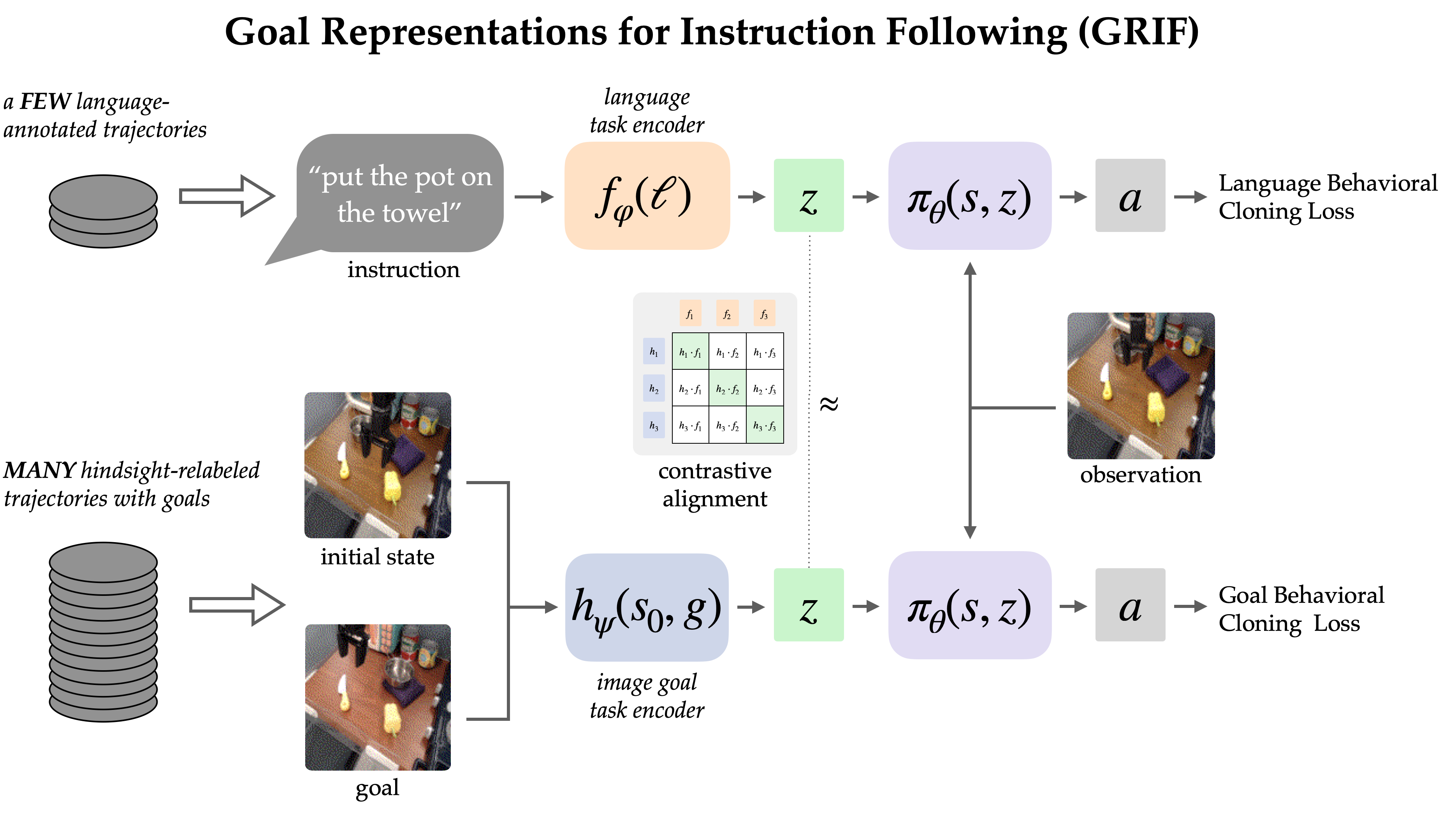
GRIF模型由语言编码器、目标编码器和策略网络组成,能够有效地根据语言指令或目标图像预测动作。
-
通过对比学习,GRIF在标注数据集上对语言和目标任务的表示进行显式对齐。
-
实验表明,GRIF在多场景下表现优异,能够有效理解和执行复杂指令,克服了传统方法的局限性。
-
未来可探索更丰富的语义对齐方法,以进一步提升机器人对语言指令的理解能力。
❓
延伸问答
GRIF模型的主要功能是什么?
GRIF模型通过语言与目标图像的对齐,提升了机器人执行指令的能力。
GRIF模型如何提高任务执行效率?
GRIF结合语言条件和目标条件的学习,利用大量未标注的轨迹数据来提高任务执行效率。
GRIF模型的结构包括哪些部分?
GRIF模型由语言编码器、目标编码器和策略网络组成。
GRIF模型在实验中表现如何?
实验表明,GRIF在多场景下表现优异,能够有效理解和执行复杂指令。
GRIF模型的对比学习是如何进行的?
GRIF通过对比学习显式对齐语言和目标任务的表示,以提高模型的学习效果。
GRIF模型的未来发展方向是什么?
未来可探索更丰富的语义对齐方法,以进一步提升机器人对语言指令的理解能力。
🏷️
