

WAIC看了一圈,这家公司的机器人在认真打工
量子位
·

史河机器人宣布完成数亿元C轮融资
全球TMT-美通国际
·



擎朗智能在WAIC 2026同步展出人形机器人与专用服务机器人
全球TMT-美通国际
·

广和通与璇玑动力在WAIC联合展示四足机器人
全球TMT-美通国际
·
看了20万小时「人类干活实录」,机器人悟了
量子位
·

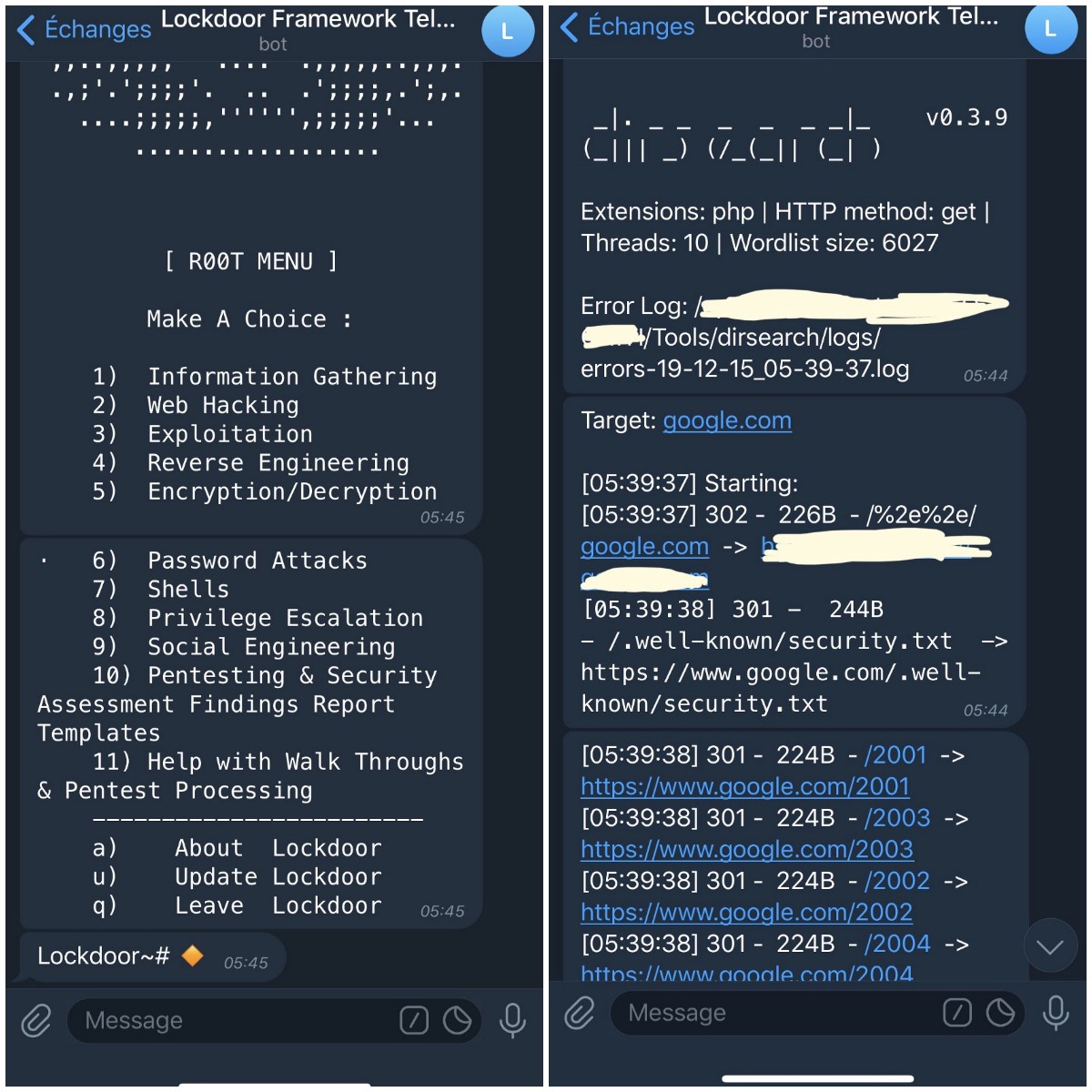
Telegram机器人作为渗透测试框架
像清水一般清澈透明
·
