
多智能体编排中的竞争条件处理
💡
原文英文,约1700词,阅读约需6分钟。
📝
内容提要
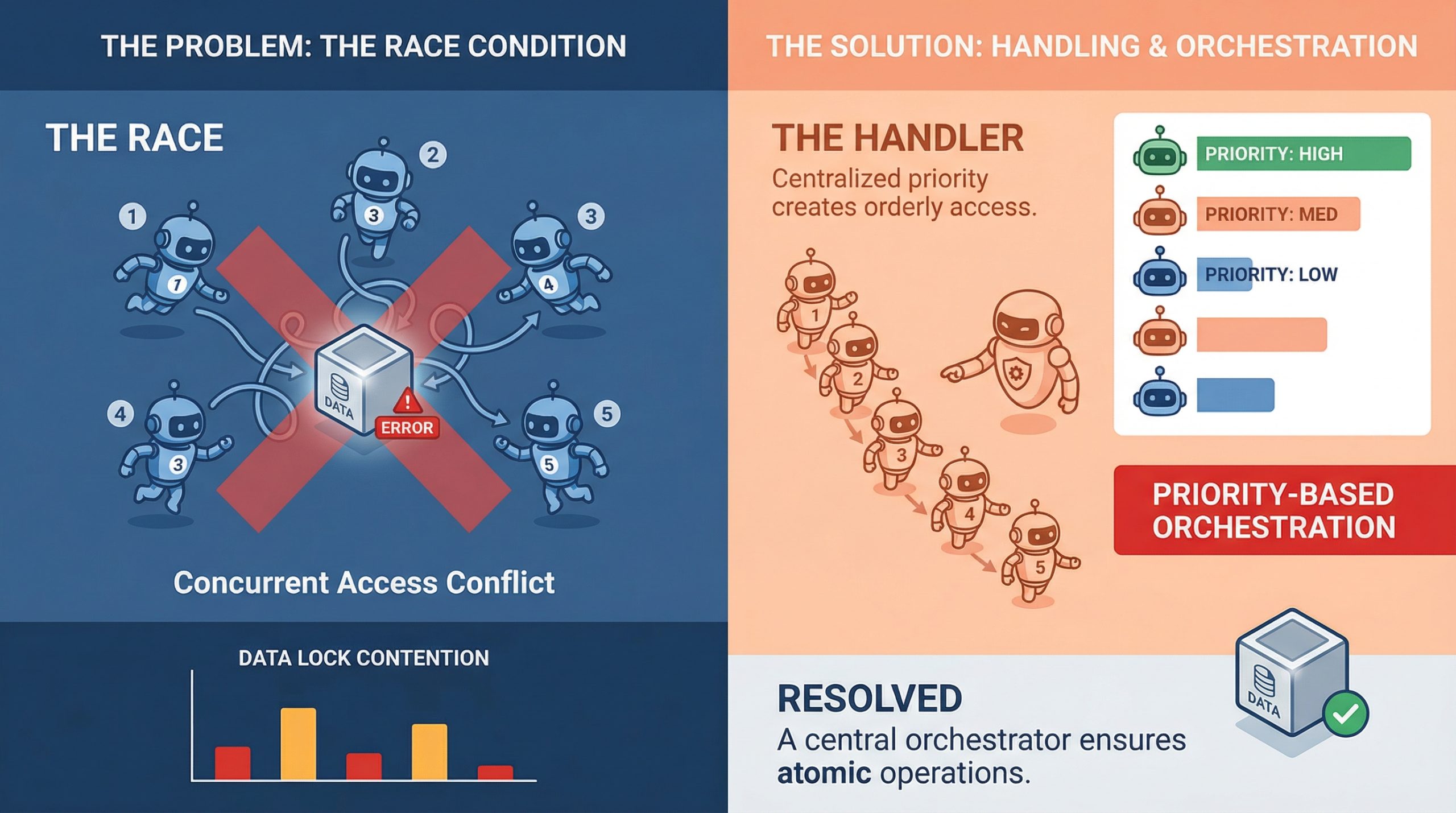
在多智能体编排系统中,竞争条件常见于多个智能体同时读取或修改共享状态。解决方案包括乐观锁、悲观锁、任务队列和事件驱动架构。确保操作的幂等性以避免重复写入和错误也很重要。通过压力测试和属性测试可以提前发现竞争条件,设计时需考虑并发问题,以提高系统的可靠性和可预测性。
🎯
关键要点
- 竞争条件发生在多个智能体同时读取、修改或写入共享状态时,最终结果取决于哪个智能体先完成操作。
- 多智能体系统中,传统的并发编程工具(如线程、互斥锁、信号量)可能不适用,因为这些系统通常基于异步框架和消息代理。
- 乐观锁和悲观锁是处理共享资源争用的直接方法,乐观锁在冲突少时有效,而悲观锁则在读取前保留资源。
- 任务队列可以有效管理任务分配,避免多个智能体直接访问共享任务列表,从而减少竞争。
- 事件驱动架构通过让智能体对事件做出反应而不是直接读取共享状态,降低了同时修改同一资源的可能性。
- 幂等性确保多次执行相同操作的结果与执行一次相同,减少重复写入和错误。
- 压力测试和属性测试可以帮助提前发现竞争条件,设计时需考虑并发问题以提高系统可靠性和可预测性。
❓
延伸问答
什么是竞争条件,它是如何在多智能体系统中发生的?
竞争条件发生在多个智能体同时读取、修改或写入共享状态时,最终结果取决于哪个智能体先完成操作。
如何通过乐观锁和悲观锁处理共享资源争用?
乐观锁在冲突少时有效,允许多个智能体并发读取;悲观锁则在读取前保留资源,防止其他智能体访问。
任务队列在多智能体编排中有什么作用?
任务队列可以有效管理任务分配,避免多个智能体直接访问共享任务列表,从而减少竞争。
事件驱动架构如何降低竞争条件的风险?
事件驱动架构让智能体对事件做出反应,而不是直接读取共享状态,从而减少同时修改同一资源的可能性。
幂等性在多智能体系统中为什么重要?
幂等性确保多次执行相同操作的结果与执行一次相同,减少重复写入和错误,提高系统的可靠性。
如何通过压力测试发现竞争条件?
通过同时启动多个智能体对共享资源进行压力测试,可以观察到哪些操作会导致竞争条件,从而提前发现问题。
➡️
