
帮助机器人自主练习技能以适应陌生环境
原文英文,约1000词,阅读约需4分钟。
📝
内容提要
研究人员开发了一种名为“估计、推断和定位”(EES)的算法,使机器人能够在陌生环境中自主练习,提高在实用任务中的表现。该算法通过视觉系统定位和跟踪机器人周围环境,估计机器人执行动作的可靠性,并决定是否需要继续练习。实验结果显示机器人在几个小时内能够学会特定技能,比以往的框架更高效。研究人员希望结合真实和虚拟练习,加速机器人的学习速度。该研究有助于创建能够自主进化和改进的家庭机器人。
🎯
关键要点
-
研究人员开发了名为“估计、推断和定位”(EES)的算法,使机器人能够在陌生环境中自主练习。
-
EES算法通过视觉系统定位和跟踪环境,估计机器人执行动作的可靠性,并决定是否需要继续练习。
-
实验表明,机器人在几个小时内能够学会特定技能,比以往框架更高效。
-
EES算法能够帮助机器人在没有人类干预的情况下,通过少量的练习试验提高技能。
-
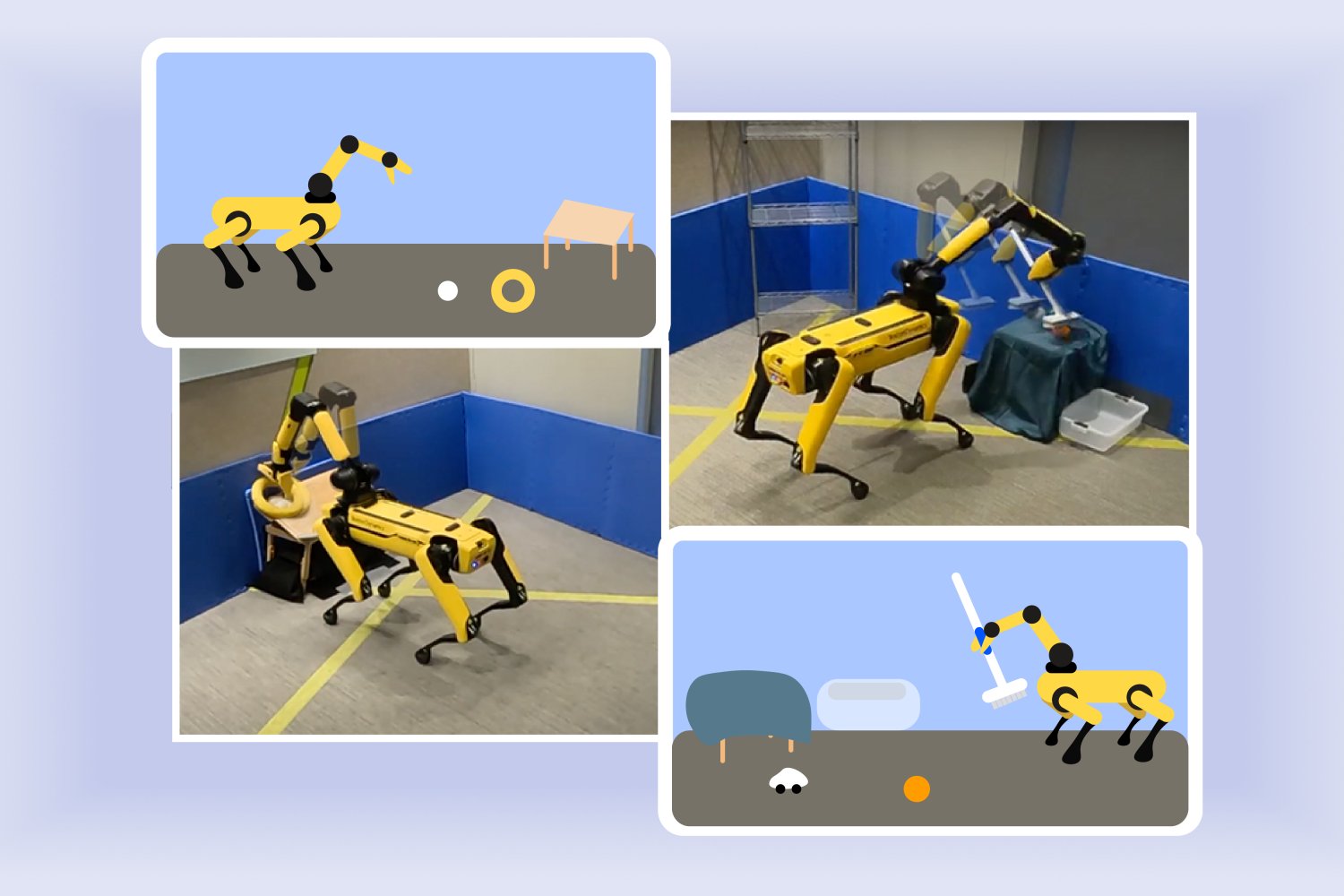
在Boston Dynamics的Spot机器人上实施EES时,机器人在几小时内完成了操作任务。
-
研究人员希望结合真实和虚拟练习,加速机器人的学习速度。
-
EES算法的研究为创建能够自主进化和改进的家庭机器人奠定了基础。
❓
延伸问答
EES算法的主要功能是什么?
EES算法使机器人能够在陌生环境中自主练习技能,提高执行任务的表现。
EES算法如何帮助机器人提高技能?
EES算法通过视觉系统定位和跟踪环境,估计动作的可靠性,并决定是否需要继续练习。
EES算法在实验中表现如何?
实验表明,机器人在几个小时内能够学会特定技能,比以往框架更高效。
EES算法的应用场景有哪些?
EES算法可用于医院、工厂、家庭和咖啡店等场所,帮助机器人自主练习各种技能。
EES算法的研究对家庭机器人有什么影响?
EES算法为创建能够自主进化和改进的家庭机器人奠定了基础。
EES算法的局限性是什么?
EES算法在实验中使用了低桌子,机器人在识别物体时存在错误,导致一些失败。
🏷️
