
新工具使任何人都能训练机器人
内容提要
麻省理工学院团队开发了一种多功能演示接口,使机器人能够通过远程控制、物理操作或示范学习任务。该接口可附加于协作机器人,提升培训灵活性,便于更多人教授机器人新技能。研究显示,志愿者更倾向于使用自然教学方法,未来可在制造和家庭等领域推广应用。
关键要点
-
麻省理工学院团队开发了一种多功能演示接口,使机器人能够通过远程控制、物理操作或示范学习任务。
-
该接口可附加于协作机器人,提升培训灵活性,便于更多人教授机器人新技能。
-
研究显示,志愿者更倾向于使用自然教学方法,未来可在制造和家庭等领域推广应用。
-
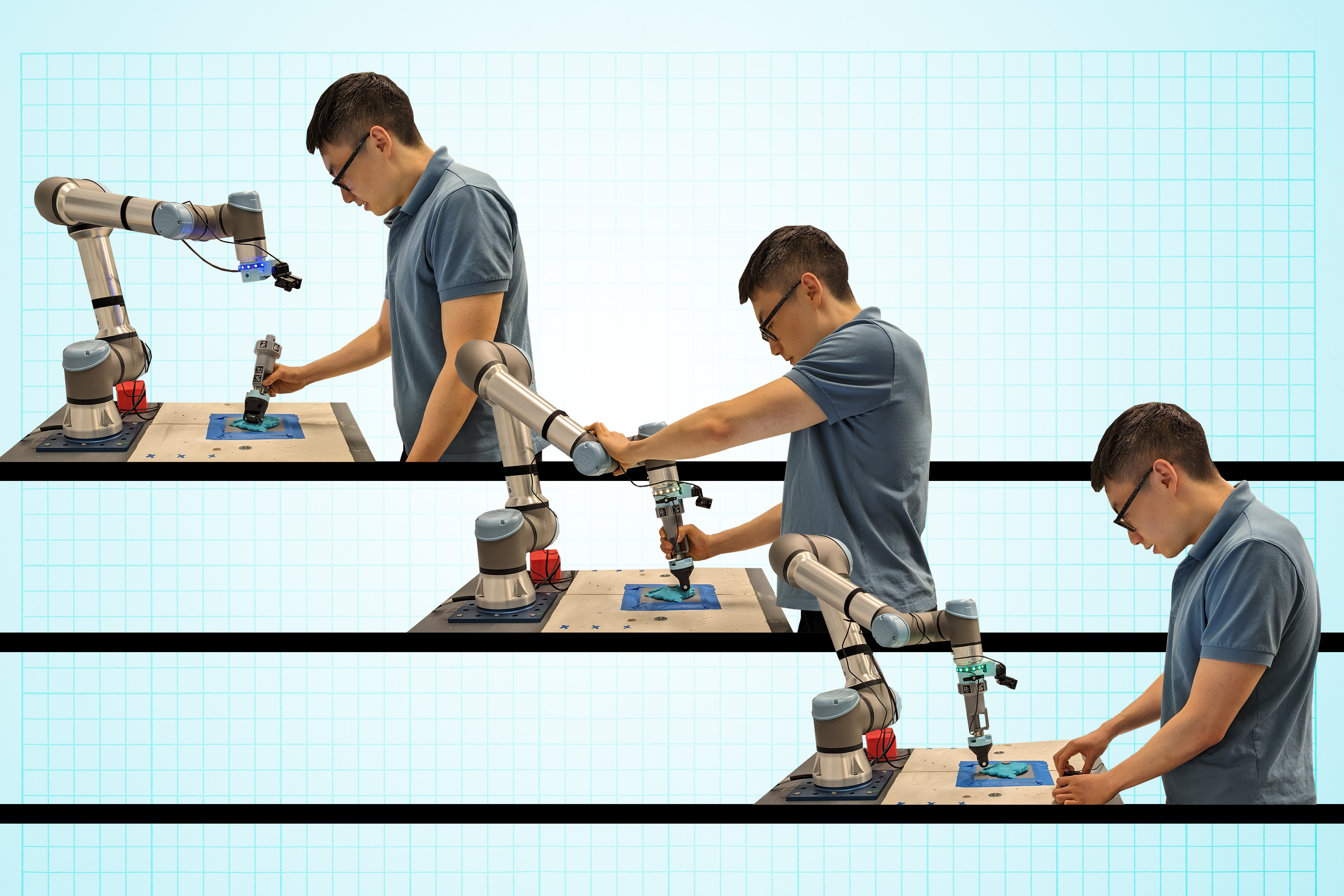
新接口允许机器人通过三种培训方法学习任务,增强了培训的灵活性。
-
研究团队的目标是创造能够与人类有效合作的智能机器人。
-
新接口的设计结合了远程操作、身体操控和自然教学三种方法,旨在提高机器人学习的效率。
-
实验中,志愿者使用三种方法完成了两项常见的制造任务,结果显示自然教学方法更受欢迎。
-
研究人员计划根据用户反馈改进接口设计,以进一步测试机器人学习能力。
延伸解读
灵活的培训方法
麻省理工学院的新工具结合了远程控制、身体操控和自然教学三种培训方法,极大地提升了机器人学习的灵活性。这种多样化的培训方式使得不同背景的人都能参与到机器人技能的教授中,降低了对专业编程知识的依赖。
应用场景的广泛性
研究团队指出,这种新接口不仅适用于制造业,还可以扩展到家庭和护理等领域。这意味着未来的机器人将能够在更广泛的环境中与人类协作,提升生活和工作的便利性。
用户反馈的重要性
研究人员计划根据用户的反馈不断改进接口设计。这种以用户为中心的设计理念将有助于确保机器人能够更好地适应实际应用中的需求,提高其学习能力和实用性。
延伸问答
新工具如何帮助机器人学习新技能?
新工具通过远程控制、物理操作和示范三种方法,使机器人能够灵活学习新技能。
麻省理工学院的研究团队在机器人培训方面的目标是什么?
研究团队的目标是创造能够与人类有效合作的智能机器人。
志愿者在实验中更倾向于使用哪种教学方法?
志愿者更倾向于使用自然教学方法。
新接口的设计有哪些主要特点?
新接口结合了远程操作、身体操控和自然教学三种方法,提升了培训灵活性。
该研究的潜在应用领域有哪些?
该研究的潜在应用领域包括制造业和家庭等场所。
研究团队计划如何改进接口设计?
研究团队计划根据用户反馈改进接口设计,以进一步测试机器人学习能力。
