
CAN协议层对比
内容提要
本文讨论了工业领域中基于CAN总线的多种通信协议,包括CANaerospace、DDS、CANopen、UAVCAN及其衍生的DroneCAN和Cyphal。每种协议在实时性、可靠性和资源占用方面各有特点,适用于无人机和自动驾驶技术等不同应用场景,并总结了各协议的优缺点及市场应用情况。
关键要点
-
工业领域需要高可靠性和低延迟的通信协议,CAN总线是基础。
-
CANaerospace专为航空电子系统设计,满足实时性和可靠性要求。
-
DDS用于自动驾驶,简化系统复杂性,依赖CAN实现数据链路。
-
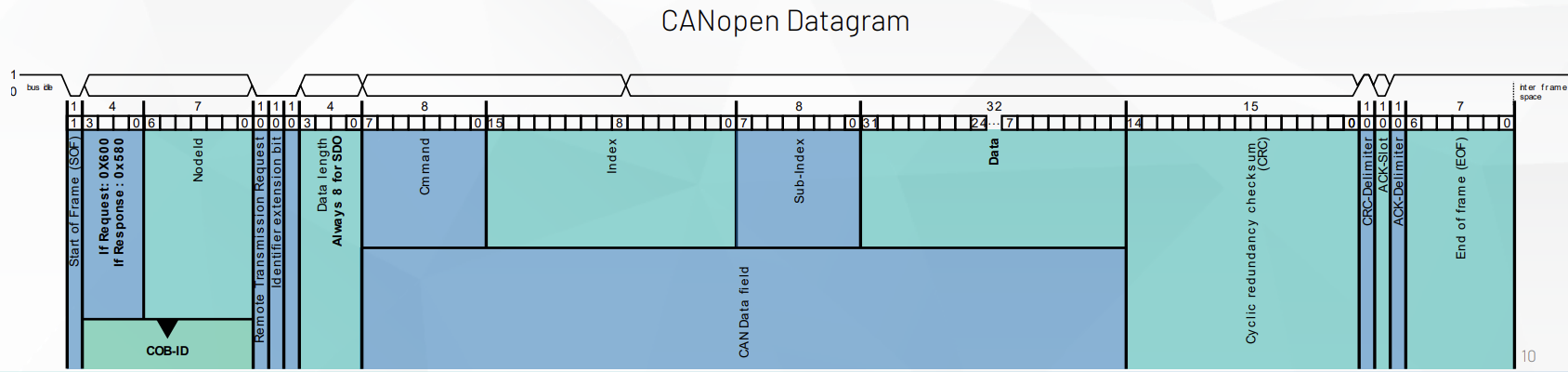
CANopen通过固定节点ID和对象字典管理设备,结构相对复杂。
-
UAVCAN项目分为DroneCAN和Cyphal,DroneCAN在无人机领域广泛应用。
-
Cyphal支持发布订阅模型和请求响应模型,具有较好的兼容性。
-
各协议在资源占用、实时性和处理开销方面存在差异,适用于不同应用场景。
延伸解读
协议选择的关键因素
在选择合适的CAN协议时,实时性、可靠性和资源占用是三个关键因素。不同的应用场景对这些因素的要求各不相同,例如,航空电子系统更注重实时性,而无人机则可能更关注资源的高效利用。了解这些差异有助于在设计系统时做出更明智的选择。
UAVCAN与其衍生协议的比较
UAVCAN项目的分化导致了DroneCAN和Cyphal的出现。DroneCAN在无人机领域应用广泛,但其对发布订阅模型的支持不够完善。相比之下,Cyphal在兼容性和数据描述方面表现更佳,适合需要更高灵活性的应用。选择时需考虑未来的扩展性和兼容性。
资源占用的考量
不同协议在资源占用上存在显著差异。DroneCAN和Cyphal相对较小,适合资源受限的设备,而CANopen和CANaerospace则占用更多资源,适合对性能要求较高的系统。在设计时,需根据设备的硬件能力合理选择协议,以避免不必要的成本和复杂性。
延伸问答
CANaerospace协议的主要应用领域是什么?
CANaerospace协议主要应用于航空电子系统,满足机载设备对实时性和可靠性的要求。
DDS协议在自动驾驶中有什么优势?
DDS协议通过简化系统复杂性,利用CAN实现数据链路,适用于自动驾驶技术。
CANopen协议的设备管理方式是什么?
CANopen协议通过固定节点ID和对象字典来管理设备,结构相对复杂。
UAVCAN项目的两个主要分支是什么?
UAVCAN项目分为DroneCAN和Cyphal两个主要分支。
Cyphal协议的核心机制是什么?
Cyphal协议的核心机制是发布订阅模型,同时支持请求响应模型。
不同协议在资源占用方面有什么差异?
不同协议在Flash占用、RAM占用和CPU占用方面存在差异,适用于不同的应用场景。
