
免费开源!基于 WinForm 开发的IDE 运动控制上位机
内容提要
该项目介绍了一款轻量级的WinForm运动控制上位机框架,旨在解决传统上位机开发中的痛点。框架采用事件驱动和依赖注入架构,支持可停靠窗口和模块化设计,提供简易的PLC式编程交互,适合中小型自动化设备,具备良好的扩展性和用户体验。
关键要点
-
该项目介绍了一款轻量级的WinForm运动控制上位机框架,旨在解决传统上位机开发中的痛点。
-
框架采用事件驱动和依赖注入架构,支持可停靠窗口和模块化设计。
-
提供简易的PLC式编程交互,适合中小型自动化设备,具备良好的扩展性和用户体验。
-
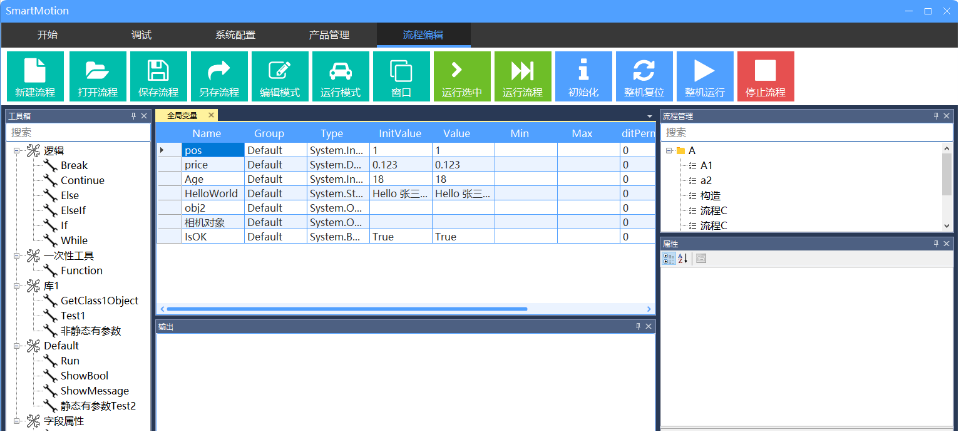
项目定位于中小型自动化设备的轻量化工业控制平台,集调试、控制、编排、配置于一体。
-
核心亮点包括仿VS可停靠布局、多模块独立、一键无缝切换、可视化流程编排等。
-
采用松耦合架构,模块间通过事件总线通信,维护更轻松。
-
退出前弹窗确认,确保运动控制卡、通信端口等硬件资源有序关闭,避免数据丢失。
-
基础框架使用C# + .NET Framework + WinForm,界面优化使用Sunny.UI组件库。
-
项目价值在于轻量化易部署、快速交付,适配非标设备和小型产线。
-
框架后续可扩展脚本引擎、OPC UA通信、远程监控等功能,适配复杂工业场景。
延伸解读
轻量化设计的优势
该框架专为中小型自动化设备设计,强调轻量化和易部署,适合快速交付的工业场景。与传统上位机相比,它能更好地适应设备的快速迭代,降低开发和维护成本。
模块化架构的灵活性
框架采用松耦合的模块化设计,各模块之间通过事件总线通信,便于扩展和维护。开发者可以根据需求灵活添加新功能,而无需对核心代码进行大幅修改,提升了开发效率。
用户体验的提升
通过仿VS的可停靠布局和可视化流程编排,用户在操作时能获得更直观的体验。自动保存界面状态的功能,减少了用户在调试过程中的重复劳动,提高了工作效率。
安全性与稳定性
框架设计中包含安全退出机制,确保在关闭程序时,所有硬件资源能够有序释放,避免数据丢失和系统崩溃。这一设计对于工业控制系统的稳定性至关重要,值得开发者关注。
延伸问答
这款WinForm运动控制上位机框架的主要特点是什么?
该框架采用事件驱动和依赖注入架构,支持可停靠窗口和模块化设计,提供简易的PLC式编程交互,适合中小型自动化设备。
这个框架适合哪些类型的设备?
该框架主要适合中小型自动化设备,能够满足其控制需求。
框架如何提高用户体验和扩展性?
框架通过松耦合架构和插件式设计,模块间通过事件总线通信,降低了扩展负担,同时提供了类IDE的操作体验。
该框架的安全退出机制是怎样的?
框架在退出前会弹窗确认,并同步触发资源释放事件,确保硬件资源有序关闭,避免数据丢失。
框架的技术选型有哪些?
基础框架使用C# + .NET Framework + WinForm,界面优化使用Sunny.UI组件库。
这个框架的未来扩展方向是什么?
框架后续可扩展脚本引擎、OPC UA通信、远程监控等功能,以适配复杂工业场景。
