
物理信息机器学习新突破!新型GNN架构可对复杂多体动力系统进行准确预测,赋能机器人/航空航天/材料科学
💡
原文中文,约6300字,阅读约需15分钟。
📝
内容提要
瑞士洛桑联邦理工学院提出的DYNAMI-CAL GraphNet结合物理规律与图神经网络,显著提高了多体动力系统的建模精度和稳定性,适用于机器人和航空航天等领域。
🎯
关键要点
-
瑞士洛桑联邦理工学院提出的DYNAMI-CAL GraphNet结合物理规律与图神经网络。
-
DYNAMI-CAL GraphNet显著提高了多体动力系统的建模精度和稳定性。
-
该方法适用于机器人、航空航天等领域。
-
传统数值模拟方法计算成本高昂,机器学习模型缺乏物理规律约束。
-
DYNAMI-CAL GraphNet将线动量和角动量守恒定律嵌入模型结构。
-
实验结果表明该方法在复杂多体动力系统中具有显著优势。
-
研究团队在四类不同的动力学系统数据集上验证了模型的通用性。
-
DYNAMI-CAL GraphNet的架构包括图表示、标量化-向量化和时空消息传递三个阶段。
-
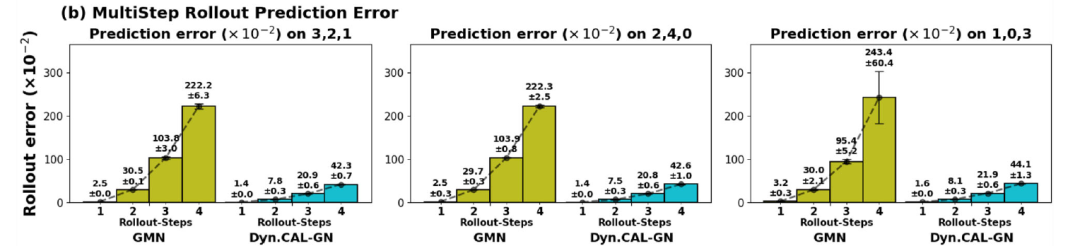
模型在多个基准任务中表现优于现有方法,显示出稳定性与泛化能力的提升。
-
DYNAMI-CAL GraphNet为具身智能的发展提供了新的技术思路。
❓
延伸问答
DYNAMI-CAL GraphNet的主要创新点是什么?
DYNAMI-CAL GraphNet将线动量和角动量守恒定律嵌入模型结构,结合了物理规律与图神经网络,显著提高了多体动力系统的建模精度和稳定性。
DYNAMI-CAL GraphNet适用于哪些领域?
该方法适用于机器人技术、航空航天工程以及材料科学等领域。
传统数值模拟方法的缺点是什么?
传统数值模拟方法计算成本高昂,特别是在长时间模拟或大规模粒子系统时,资源消耗巨大。
DYNAMI-CAL GraphNet的架构包括哪些阶段?
DYNAMI-CAL GraphNet的架构包括图表示、标量化-向量化和时空消息传递三个阶段。
DYNAMI-CAL GraphNet在实验中表现如何?
实验结果表明,DYNAMI-CAL GraphNet在多个基准任务中表现优于现有方法,显示出稳定性与泛化能力的提升。
DYNAMI-CAL GraphNet如何保证物理一致性?
该模型通过将线动量和角动量守恒定律直接嵌入网络结构,显式保证物理一致性。
➡️
