
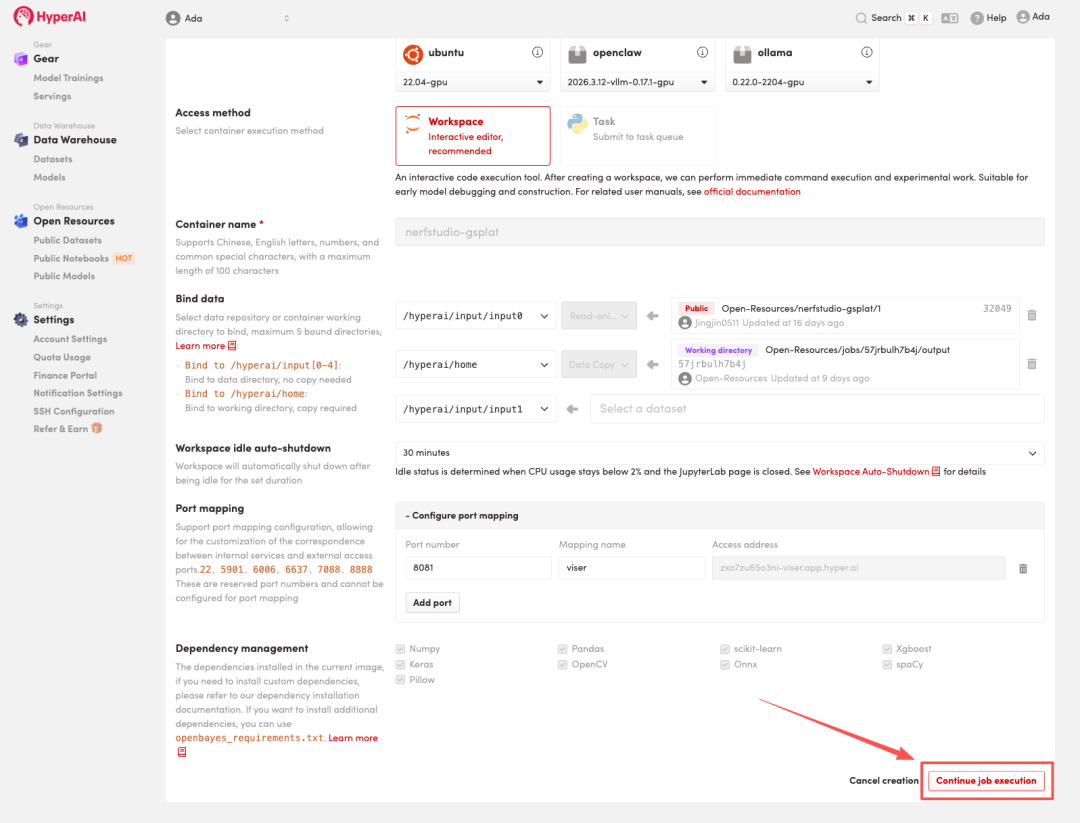
在线教程丨UC伯克利/英伟达等发布3DGS开源库gsplat,节省4倍显存,训练时间缩短10%
HyperAI超神经
·
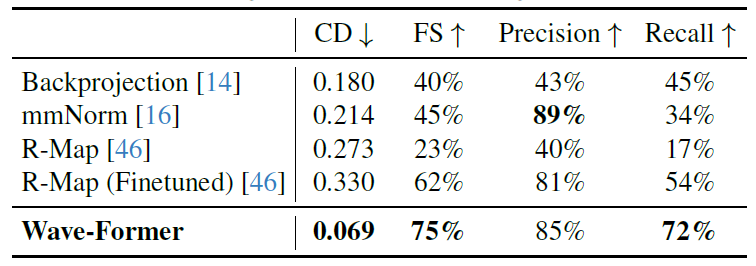
高精度重建完全遮挡物体,MIT团队利用生成式AI改进无线视觉系统,最高精度达85%
HyperAI超神经
·
人工智能驱动的作业助手:疑难杂症轻松搞定 | 开源日报 No.834
开源服务指南
·

