MIT开发的“SceneSmith”系统利用协作AI代理生成逼真的3D室内环境,帮助机器人模拟日常任务。该系统通过三个代理生成多样化的场景,使机器人在实际操作前进行有效训练,生成的环境与真实世界高度相似,能够有效评估机器人的任务执行能力。
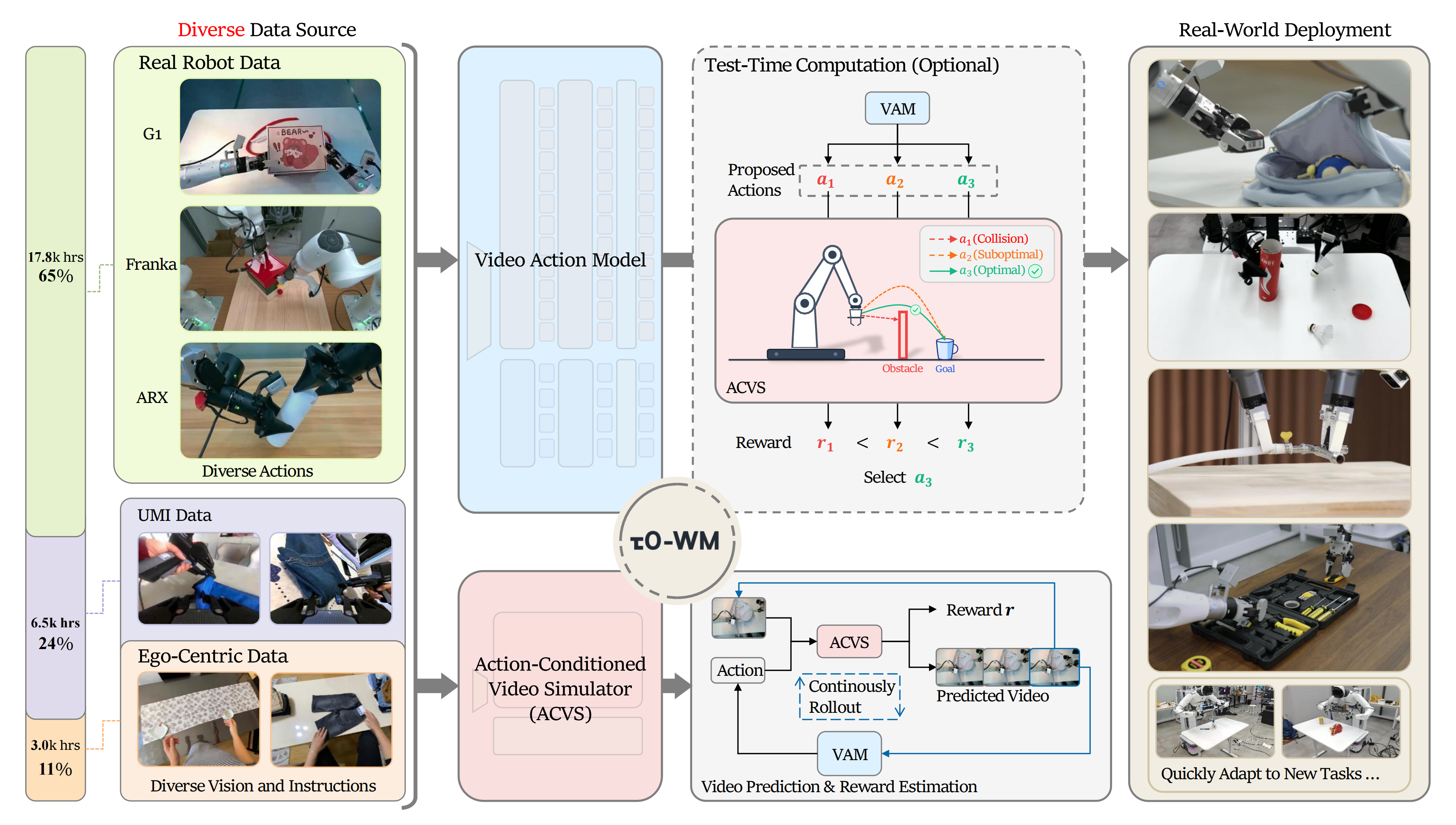
研究者提出了一种名为τ0-World Model(τ0-WM)的统一视频-动作世界模型,旨在提升机器人操作的预测能力。该模型结合视频预测、动作生成和任务评估,利用27,300小时的多样化数据进行训练。τ0-WM通过共享的预测网络,提供视频动作模型和动作条件视频模拟器两个接口,优化机器人在执行前的决策过程。
大型语言模型代理网络(DyLAN)在推理和代码生成任务中表现出色,通过优化算法选择最佳代理,提升了MATH和HumanEval任务的性能。AgentTuning方法增强了语言模型的代理能力,AgentLM在未知任务中与GPT-3.5-turbo相当。LLMArena框架评估多代理环境中的能力,发现LLM在对手建模和团队协作方面仍需改进。新提出的$ au$-bench基准测试评估代理与用户的交互能力,结果显示现有代理在任务一致性上存在不足。
该论文提出了一种目标驱动的网络导航模型,评估智能体的自然语言理解和规划能力。通过多种数据集评估,展示了模型在任务完成和性能提升方面的潜力,并介绍了多模态代理的评估框架和新任务,强调了复杂用户任务中的挑战及改进方法。
本文探讨了自然语言处理领域的语言理解能力和大型语言模型的出现对任务和模型评估的挑战,并提出了多方面评估协议的建议,以实现对语言的更全面视角和可靠性的核心地位。
完成下面两步后,将自动完成登录并继续当前操作。