
τ0-WM——智元的视频-动作世界模型:组合“遥操、umi、人类第一人称视角”数据,未来视觉Latent助力动作生成,然后重新加噪去噪,若自洽取表现最好者直接执行,否则模拟推演找出最佳视觉指引重新生成
内容提要
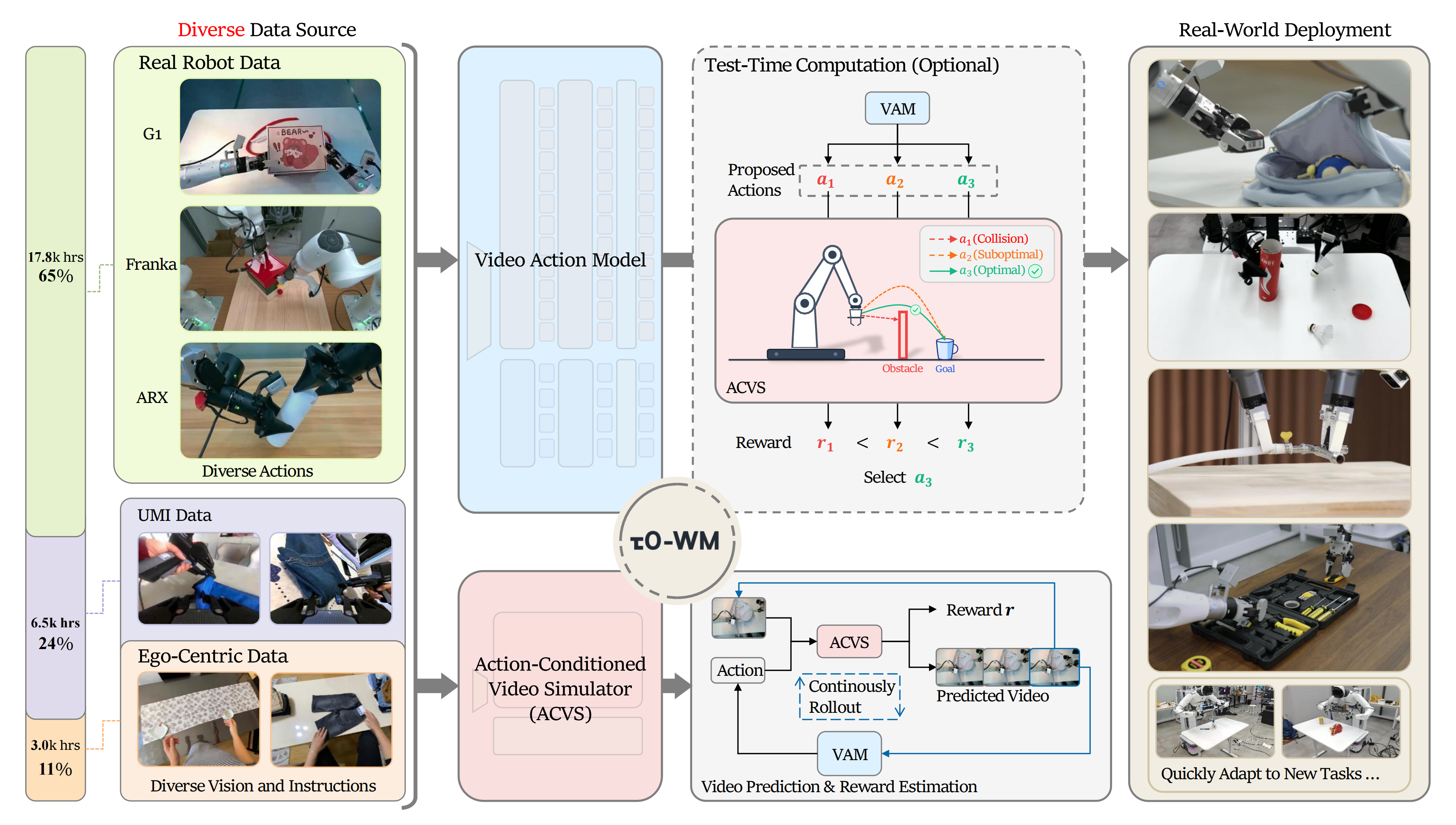
研究者提出了一种名为τ0-World Model(τ0-WM)的统一视频-动作世界模型,旨在提升机器人操作的预测能力。该模型结合视频预测、动作生成和任务评估,利用27,300小时的多样化数据进行训练。τ0-WM通过共享的预测网络,提供视频动作模型和动作条件视频模拟器两个接口,优化机器人在执行前的决策过程。
关键要点
-
研究者提出了一种名为τ0-World Model(τ0-WM)的统一视频-动作世界模型,旨在提升机器人操作的预测能力。
-
τ0-WM结合视频预测、动作生成和任务评估,利用27,300小时的多样化数据进行训练。
-
该模型通过共享的预测网络,提供视频动作模型和动作条件视频模拟器两个接口,优化机器人在执行前的决策过程。
-
τ0-WM的核心思想是将未来观测、机器人动作生成和任务进展共同嵌入到一个共享的预测模型中。
-
模型在训练中使用了真实机器人远程操作数据、UMI风格示范、自我视角人类视频和回滚或失败轨迹等多种数据源。
-
τ0-WM的两个接口分别是视频动作模型(VAM)和动作条件视频模拟器(ACVS),前者预测未来视觉潜在表示和动作片段,后者预测多视角未来视频和任务进度评分。
-
模型通过提议–评估–修订的过程,利用对未来的预测来改进机器人动作的决策机制。
延伸解读
模型的多样化数据源
τ0-WM模型的训练依赖于多种数据源,包括真实机器人遥操作数据、UMI风格示范和自我视角人类视频。这种多样化的数据源使得模型能够在不同的环境和任务中学习,从而提高其泛化能力。然而,数据采集的高成本和覆盖范围的局限性仍然是模型应用中的挑战。
提议–评估–修订过程的意义
τ0-WM采用的提议–评估–修订过程为机器人决策提供了一种动态调整机制。通过对候选动作的评估和修正,模型能够在执行前优化动作选择。这种方法不仅提高了机器人操作的准确性,还能有效降低因错误决策带来的风险。
视频动作模型与动作条件视频模拟器的区别
τ0-WM中的视频动作模型(VAM)和动作条件视频模拟器(ACVS)各自承担不同的功能。VAM主要负责预测机器人应执行的动作,而ACVS则评估这些动作的潜在后果。这种分工使得模型在决策时能够更全面地考虑未来的视觉动态和任务进展,提升了整体决策的有效性。
延伸问答
τ0-WM模型的主要功能是什么?
τ0-WM模型旨在提升机器人操作的预测能力,结合视频预测、动作生成和任务评估。
τ0-WM是如何训练的?
τ0-WM利用27,300小时的多样化数据进行训练,包括真实机器人远程操作数据、UMI风格示范和自我视角人类视频等。
τ0-WM的两个主要接口是什么?
τ0-WM的两个主要接口是视频动作模型(VAM)和动作条件视频模拟器(ACVS)。
τ0-WM如何优化机器人决策过程?
τ0-WM通过提议–评估–修订的过程,利用对未来的预测来改进机器人动作的决策机制。
τ0-WM模型的核心思想是什么?
τ0-WM的核心思想是将未来观测、机器人动作生成和任务进展共同嵌入到一个共享的预测模型中。
使用τ0-WM模型的潜在优势是什么?
使用τ0-WM模型可以提高机器人在执行任务前的决策准确性和效率,减少执行错误。
