杰金斯项目研究如何将猴子大脑中的神经活动解码为机器人运动,并反向生成合成神经数据。该项目通过建模真实神经数据,推动脑机接口的发展,促进脑控机器人和假肢的进步,并提供开放源代码工具以增强研究的可重复性。
为了解决多模式和多通道记录的生物信号以及其对污染的高敏感性这一困难问题,本文提出了一种识别系统,其中包括两个协同工作的多分类器系统,其中一个用于识别污染通道,另一个用于识别患者意愿导致的运动类别,通过动态选择机制,该系统实现了改进的分类质量。
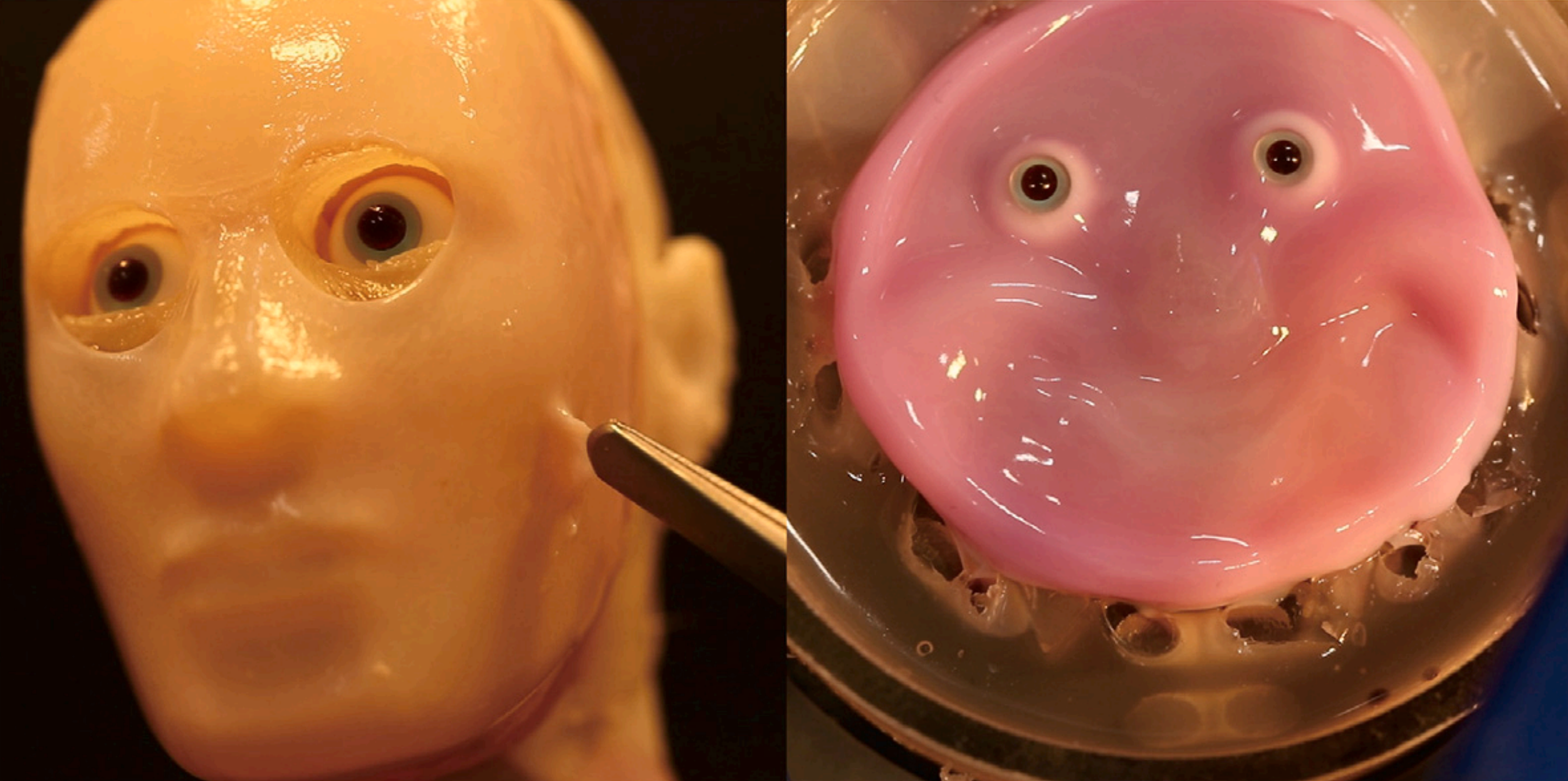
日本科学家利用活体人类皮肤细胞制作了一张机器人脸,能够笑和动,解决了机器人皮肤固定的问题。研究人员通过模仿人类皮肤韧带结构设计了穿孔型锚,使皮肤能够与机器人的机械部件一起运动。这项技术不仅可以应用于机器人制造,还有潜力在假肢、治疗烧伤等领域发挥作用。
新型吸引子神经网络可实现芯片上的运动解码,用于下一代便携式机械假手,同时具有较高的解码准确性和超小的硬件复杂性。
提出了一种低成本的智能非侵入式神经驱动假肢系统 MindArm,它使用深度神经网络将大脑信号翻译为假肢的运动,为患有残疾或运动障碍的人提供了一种替代的低成本的脑控假肢设备。
该研究开发了一种受人类眼睛和大脑启发的双流视觉模型,模拟人眼将视网膜输入分离到大脑的过程。该模型能够主动探索和理解视觉环境。
该研究介绍了一种创新的零样本方法,利用图像生成扩散模型实现无标记姿态估计,为下肢假肢的步态分析提供了有希望的解决方案。研究结果证实了这种方法的可行性,并强调其在推进下肢截肢者步态分析方面的潜力。
本文提出了一种基于分类方法的扩展计划识别方法,通过训练观察行为数据,能够更可靠地识别正确目标,提高了混合目标识别方法在智能辅助系统中的实用性。
完成下面两步后,将自动完成登录并继续当前操作。