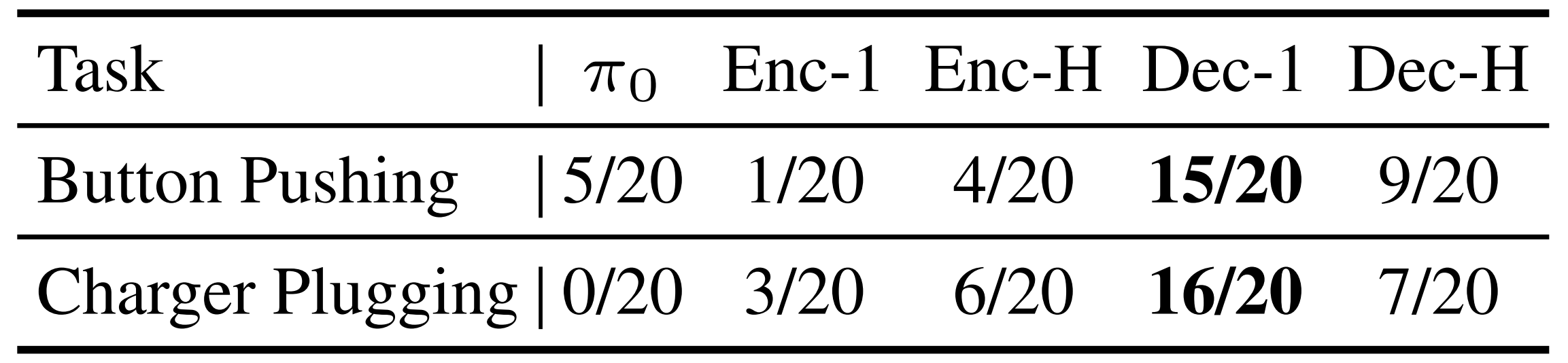
本文探讨了将关节力矩信号融入视觉-语言-动作(VLA)模型的设计,以提升机器人在物理交互中的表现。研究表明,将即时和历史力矩信息编码为单一解码器token能取得最佳效果,结合动作和力矩的预测任务可进一步增强模型性能。实验验证了该方法在高接触和常规任务中的有效性与泛化能力。
本研究解决了力矩传感器在行星导航中应用不足的问题。通过对六轮行星车在不同地形、速度和坡度下的数据评估,提出了这些传感器在 traction 表现评估中的潜在价值。研究结果可为未来的传感器集成和控制算法改进提供参考,从而提升导航能力。
通过学习六维受力和力矩的监督式变分自编码器,研究发现软式机器人手指的抓握知识在陆地和水下具有可转移性。训练的模型可以适应商用传感器环境的变化,提高了水下夹持器的可靠性和稳健性,降低了成本,为学习智能抓握和海洋研究提供了基础。
完成下面两步后,将自动完成登录并继续当前操作。