
TA-VLA——将关节力矩反馈融入VLA中:无需外部力传感器,即可完成汽车充电器插入(且可多次自主尝试)
内容提要
本文探讨了将关节力矩信号融入视觉-语言-动作(VLA)模型的设计,以提升机器人在物理交互中的表现。研究表明,将即时和历史力矩信息编码为单一解码器token能取得最佳效果,结合动作和力矩的预测任务可进一步增强模型性能。实验验证了该方法在高接触和常规任务中的有效性与泛化能力。
关键要点
-
本文探讨将关节力矩信号融入视觉-语言-动作(VLA)模型,以提升机器人在物理交互中的表现。
-
研究发现,将即时和历史力矩信息编码为单一解码器token能取得最佳效果。
-
结合动作和力矩的预测任务可进一步增强模型性能。
-
实验验证了该方法在高接触和常规任务中的有效性与泛化能力。
-
力矩信号能够在无需外部力传感器的情况下,反映末端执行器接触动态的微妙变化。
-
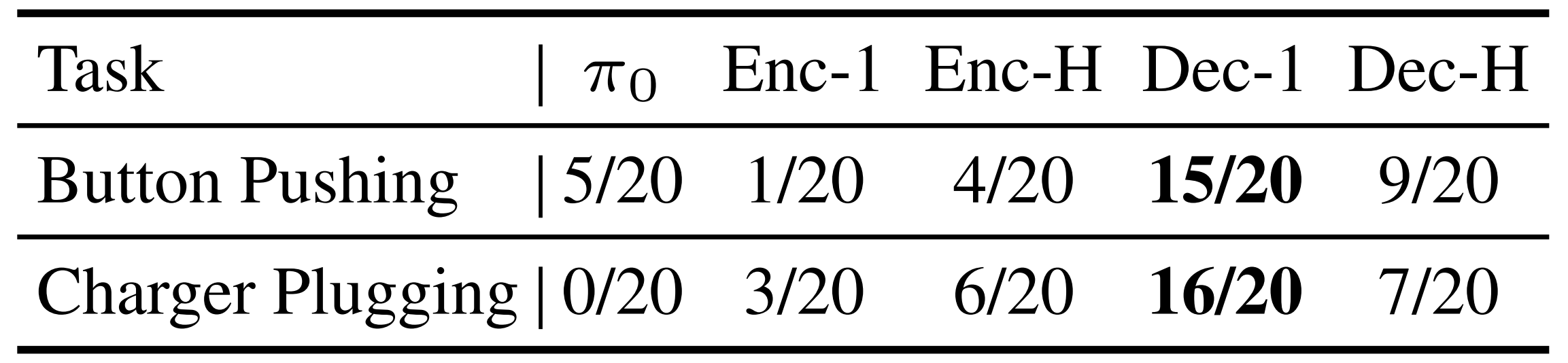
将力矩信号集成到解码器中优于编码器,能够更好地利用本体感觉信号的相关性。
-
历史力矩信息比单帧输入更具信息量,整体分词优于逐帧分词。
-
引入统一的动作-力矩扩散模型,通过力矩预测实现前瞻性学习,增强模型对接触动力学的理解。
延伸解读
关节力矩的优势
关节力矩信号在机器人操作中提供了重要的物理反馈,能够在无需外部传感器的情况下,反映末端执行器的接触动态。这种信号的集成使得机器人在执行任务时能够更好地理解和适应环境变化,尤其是在高接触任务中表现出色。
模型设计的关键选择
将力矩信号嵌入到解码器中而非编码器中,能够更有效地利用本体感觉信号的相关性。这一设计选择在处理细微的接触变化时尤为重要,能够提升模型在复杂任务中的表现。
历史信息的重要性
研究表明,历史力矩信息的编码优于单帧输入,能够为模型提供更丰富的物理交互模式。这种方法在高接触任务中显著提升了模型的性能,强调了时间序列数据在机器人学习中的重要性。
未来的研究方向
尽管当前方法在多样化任务中表现良好,但其对电机校准和传感器噪声的依赖可能影响长期性能。未来的研究需要探索如何在更复杂的环境中保持模型的鲁棒性,并考虑将其他物理模态(如触觉感知)集成到现有框架中。
延伸问答
TA-VLA模型如何提升机器人在物理交互中的表现?
TA-VLA模型通过将关节力矩信号融入视觉-语言-动作(VLA)模型,增强了机器人对接触动态的理解,从而提升其在物理交互中的表现。
将力矩信号集成到解码器中有什么优势?
将力矩信号集成到解码器中能够更好地利用本体感觉信号的相关性,提高对细粒度变化的敏感性,尤其在接触丰富的场景中表现更佳。
历史力矩信息在模型中扮演什么角色?
历史力矩信息提供了比单帧输入更丰富的信息,有助于模型在高接触任务中实现更优的性能。
TA-VLA模型的实验验证了哪些方面的有效性?
实验验证了TA-VLA模型在高接触和常规任务中的有效性与泛化能力,显示出其在多样化场景下的实用性。
如何通过TA-VLA模型实现前瞻性学习?
TA-VLA模型通过引入统一的动作-力矩扩散模型,结合动作和力矩的预测任务,实现了前瞻性学习,增强了模型对接触动力学的理解。
TA-VLA模型在实际应用中有哪些局限性?
TA-VLA模型依赖于电机内部电流进行的精确扭矩估算,可能受到校准、传感器噪声或热漂移的影响,导致在高负载任务中性能下降。
