戴盟机器人发布了全球最大规模的全模态物理世界数据集Daimon-Infinity,涵盖触觉、视觉等多维信息,计划形成数百万小时的数据。该数据集将用于真实场景的物理交互,推动具身智能的发展,并已开源10000小时高质量数据,构建了外发式数据采集网络,形成完整的数据处理闭环。
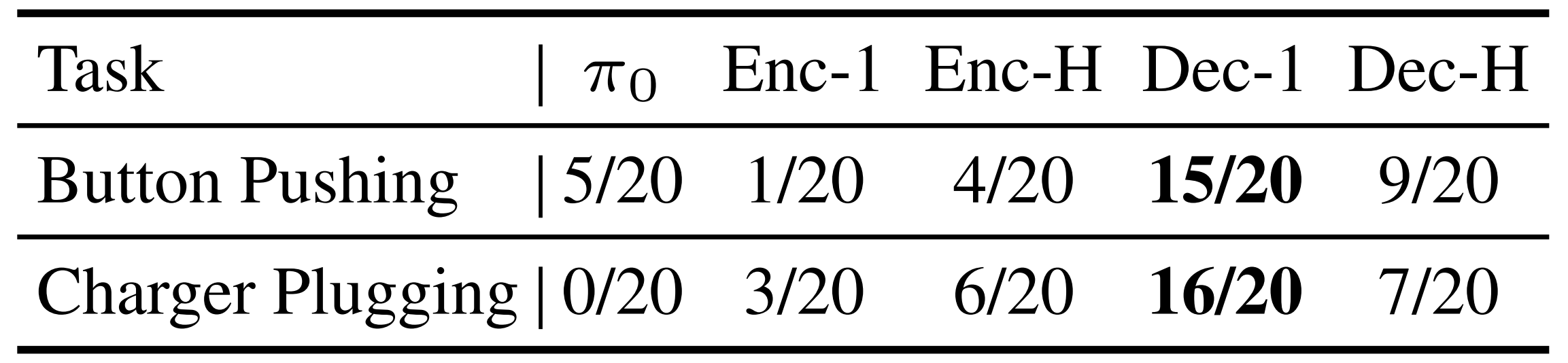
本文探讨了将关节力矩信号融入视觉-语言-动作(VLA)模型的设计,以提升机器人在物理交互中的表现。研究表明,将即时和历史力矩信息编码为单一解码器token能取得最佳效果,结合动作和力矩的预测任务可进一步增强模型性能。实验验证了该方法在高接触和常规任务中的有效性与泛化能力。
本文介绍了多种基于触觉传感技术的研究,包括深度触觉模型、触觉显著性预测、模拟器TACTO及事件驱动的视觉触觉感知系统。这些研究旨在提升机器人在物理交互中的感知能力和控制精度,强调了触觉反馈在场景预测和物体重建中的重要性。
完成下面两步后,将自动完成登录并继续当前操作。