本文介绍了Ψ0模型,该模型结合大规模人类视频数据与真实机器人数据,训练出一种用于类人机器人灵巧运动的视觉-语言动作模型,能够有效提取运动先验,实现复杂的全身控制。
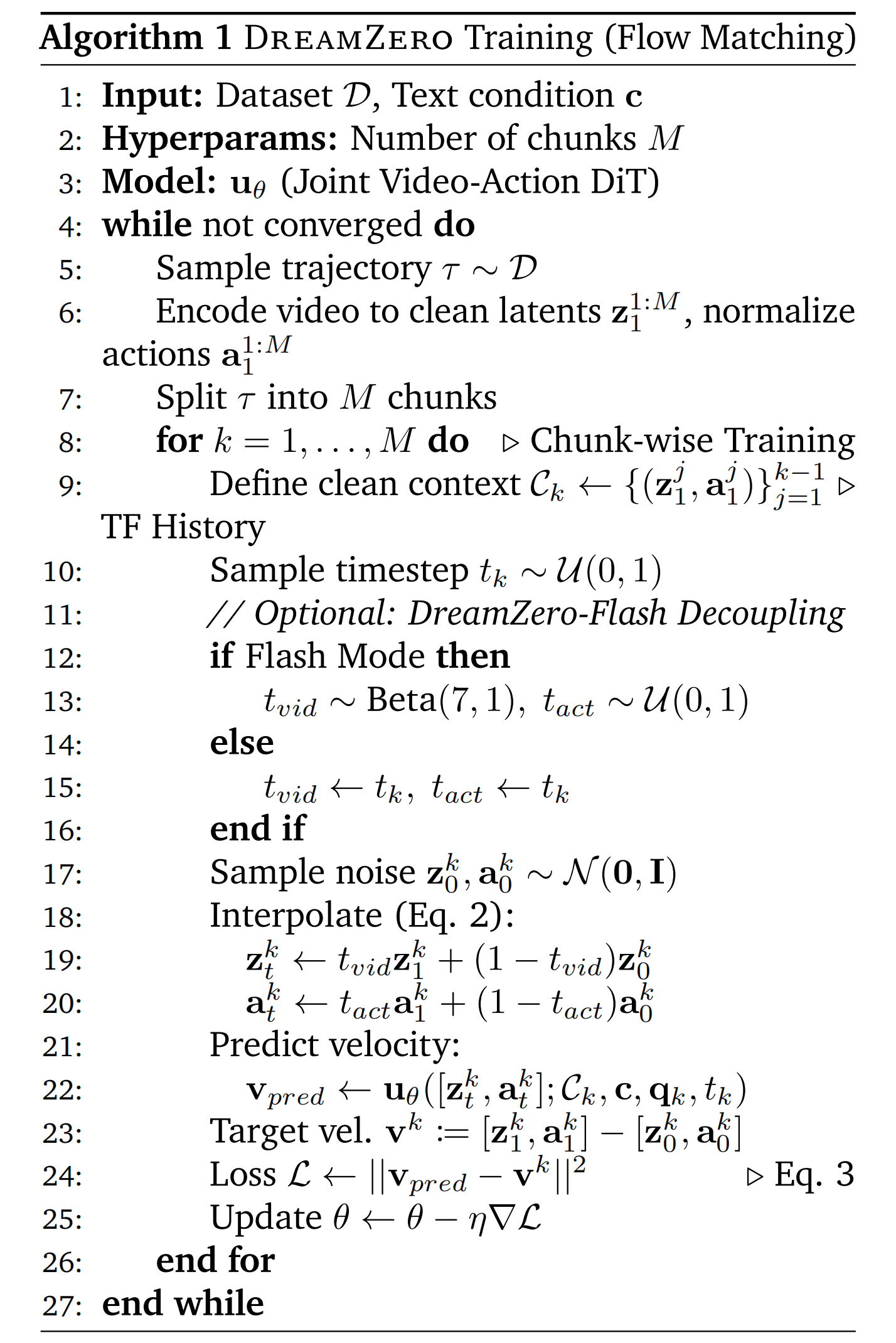
DreamZero是一种新型世界动作模型,通过联合预测视频和动作,提升机器人在新环境中的泛化能力。与传统模型相比,DreamZero能够高效学习多样化技能,支持零样本泛化,并实现实时控制。其核心在于利用预训练的视频扩散模型,结合自回归架构和优化策略,提高推理速度和准确性。
蚂蚁灵波开源的LingBot-VA是全球首个因果视频-动作模型,能够预测未来并执行任务,具备长期记忆和高效泛化能力,适应新任务。通过视频推演,机器人在复杂任务中表现优异,标志着通用机器人进入视频时代。
NORA是一种小型开源视觉语言动作模型,旨在克服现有模型在视觉编码中的局限性。它通过降低计算开销和增强视觉推理,超越了大型视觉语言动作模型,成为实时机器人自主性的有效解决方案。
完成下面两步后,将自动完成登录并继续当前操作。