CyclicBarrier是Java中的同步工具,允许多个线程在特定点等待,所有线程到达后可继续执行。它可重复使用,适用于多阶段任务或游戏模拟等场景,使用时需处理异常以确保线程安全。
本文探讨了大型语言模型(LLMs)在复杂旅行规划中的应用与挑战,提出了一种结合经典规划方法的交互规划框架,显著提升了规划能力。实验表明,LLMs在自主规划方面表现有限,但在启发式模式下能改善其他智能规划器的效果,旨在构建高效的旅行规划系统以应对多阶段任务。
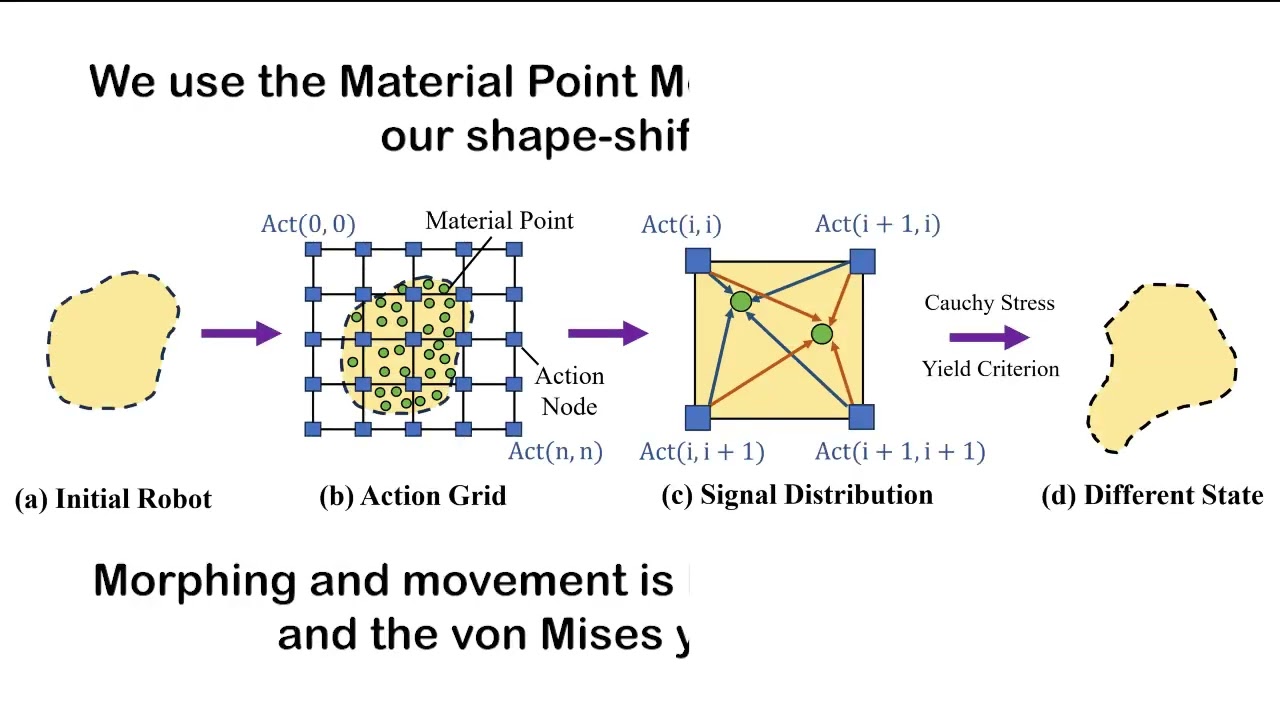
麻省理工学院的研究人员开发了一种新算法,能够控制可重构软机器人动态改变形状,以完成避障和物品取回等多种任务。他们还创建了一个模拟器,测试该算法在复杂任务中的表现,展示了其在多阶段任务中的优越性,未来有望推动软机器人在医疗和工业中的应用。
完成下面两步后,将自动完成登录并继续当前操作。