
更好的控制变形软机器人的方法
原文英文,约1700词,阅读约需6分钟。
📝
内容提要
麻省理工学院的研究人员开发了一种新算法,能够控制可重构软机器人动态改变形状,以完成避障和物品取回等多种任务。他们还创建了一个模拟器,测试该算法在复杂任务中的表现,展示了其在多阶段任务中的优越性,未来有望推动软机器人在医疗和工业中的应用。
🎯
关键要点
-
麻省理工学院的研究人员开发了一种新算法,能够控制可重构软机器人动态改变形状,以完成多种任务,如避障和物品取回。
-
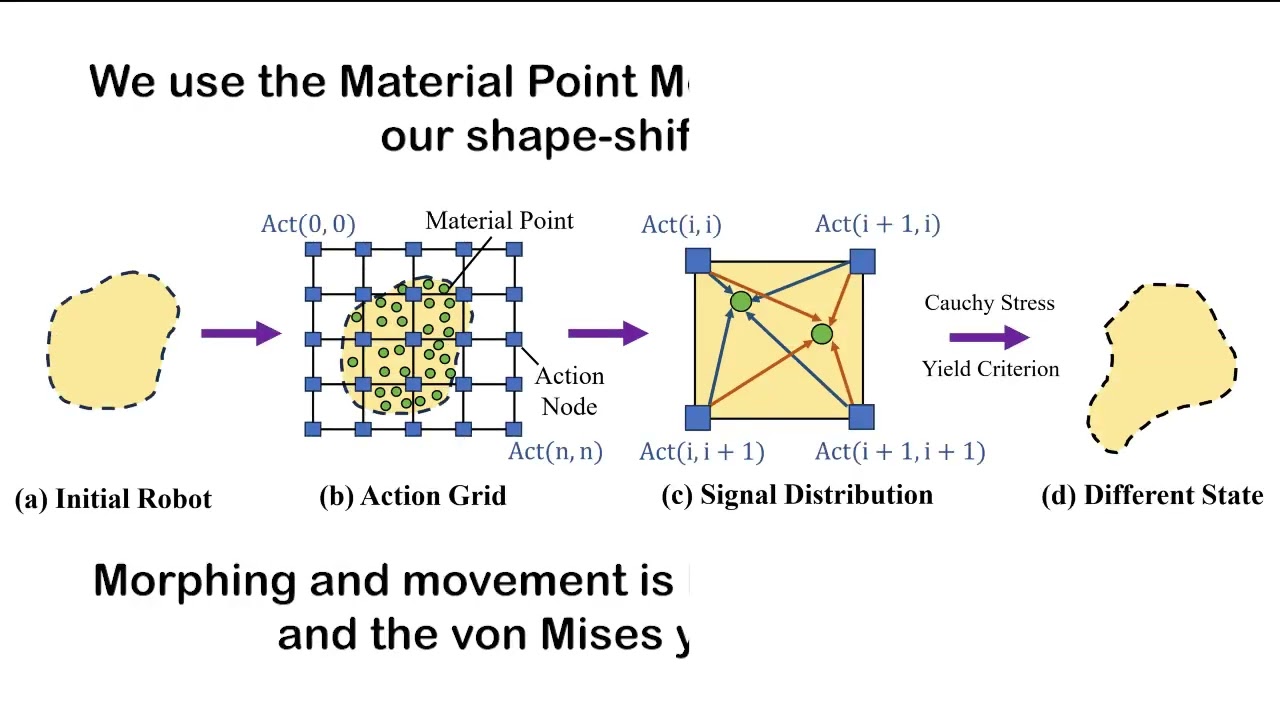
研究团队创建了一个名为DittoGym的模拟器,用于测试控制算法在复杂任务中的表现,展示了其在多阶段任务中的优越性。
-
该算法通过强化学习方法,首先学习控制相邻肌肉群,然后再细化到单个肌肉的控制,从而有效地应对形状变化的挑战。
-
研究表明,该算法在八个评估任务中表现优异,尤其在需要多次形态变化的复杂任务中,超越了其他算法。
-
研究人员希望该技术未来能推动软机器人在医疗和工业中的应用,尽管目前可重构软机器人仍处于初期阶段。
❓
延伸问答
麻省理工学院的研究人员开发了什么新技术来控制软机器人?
他们开发了一种新算法,能够控制可重构软机器人动态改变形状,以完成多种任务。
DittoGym模拟器的主要功能是什么?
DittoGym用于测试控制算法在复杂任务中的表现,评估软机器人动态改变形状的能力。
该算法是如何处理软机器人形状变化的挑战的?
算法通过强化学习方法,首先学习控制相邻肌肉群,然后细化到单个肌肉的控制。
研究人员希望该技术在未来的应用领域有哪些?
研究人员希望该技术能够推动软机器人在医疗和工业中的应用。
该算法在评估任务中的表现如何?
该算法在八个评估任务中表现优异,尤其在需要多次形态变化的复杂任务中超越了其他算法。
软机器人与传统机器人有什么不同?
软机器人可以动态改变形状,而传统机器人通常有固定的关节和肢体。
🏷️
