三相电流采样后,由于交流特性出现正负电流。当电机反电动势高于输入电压时,会产生负扭矩。控制算法需考虑电流大小及与转子的夹角,负夹角需转化为负电流处理。通过调节负电流和负电压,简化了控制算法,确保正反转控制一致。需要注意的是,负电流并不等于发电,只有当电流与电压的乘积为负时,才表示发电。
下载大文件时,速度逐渐提升是因为系统在测试网络承载能力。TCP拥塞控制算法(如慢启动和拥塞避免)应运而生,以防止网络崩溃。新算法CUBIC和BBR通过智能调整发送速率,提高网络性能,减少拥堵。
本文介绍了humanoidverse环境模块的结构与功能,涵盖基础任务架构、运动控制与追踪任务的实现,以及机器人运动数据管理和奖励计算等核心组件,重点分析了运动库初始化、数据加载策略和差异计算方法,支持多种物理引擎和配置管理。
最近宽带丢包严重,使用BBR算法后带宽从2mbps提升至20mbps。BBR是Google开源的TCP拥塞控制算法,能够实时估算网络瓶颈,提升网页加载和视频流畅度。在OpenWrt上启用BBR需确认内核支持,安装相应模块并修改配置。
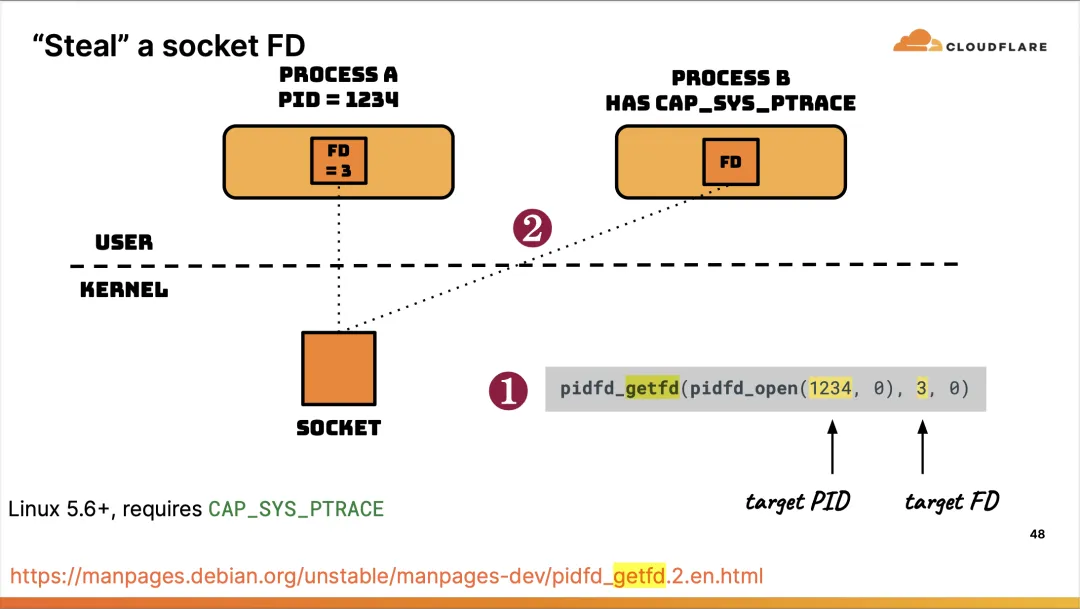
我们在哔哩哔哩开发并测试了一种改进的BBR拥塞控制算法。在此过程中,遇到了内核错误,通过热交换和套接字窃取等方法成功修复了该错误。
本研究提出了Agent-Arena框架,旨在解决机器人控制算法在新环境中的适应性问题。该框架支持多种控制算法,简化了决策策略的集成与测试,适用于模拟和真实场景。
上海AI Lab团队在机器人控制领域取得突破,提出HoST算法,使人形机器人能够在复杂环境中自主站立。该算法基于强化学习,解决了坐立转换问题,具备强抗干扰能力,适用于家庭和医疗场景。研究者设计多种奖励函数以优化控制策略,提升学习效率,并在多种地形上成功测试。
本研究提出了一种新方法,结合偏微分方程的反向反馈控制与深度强化学习,以应对空间变量引起的延迟对分布参数系统控制的挑战。通过软演员-评论家架构和深度操作网络,模拟结果表明该算法优于传统控制器。
本研究旨在解决深度强化学习(DRL)在无人机控制中面临的高计算要求和低可解释性问题。提出了一种使用交织程序图(TPGs)作为控制相关任务的新方法,TPGs更具计算效率且具有更好的可解释性。研究表明,TPGs在基于激光雷达传感器的未知环境中进行无人机导航任务中展现了良好的前景。
本文探讨了基于循环神经网络的控制方法,以解决弹性操纵器的非线性问题。提出的LAC算法结合期望轨迹生成和阻抗参数调整,提升了协同操作的效率和鲁棒性。实验结果表明,该方法在任务完成时间和工作负荷方面优于传统控制方法。此外,研究还模拟了肌腱致动机器人的滞后行为,发现不同模型在捕捉时间依赖性方面表现相似。
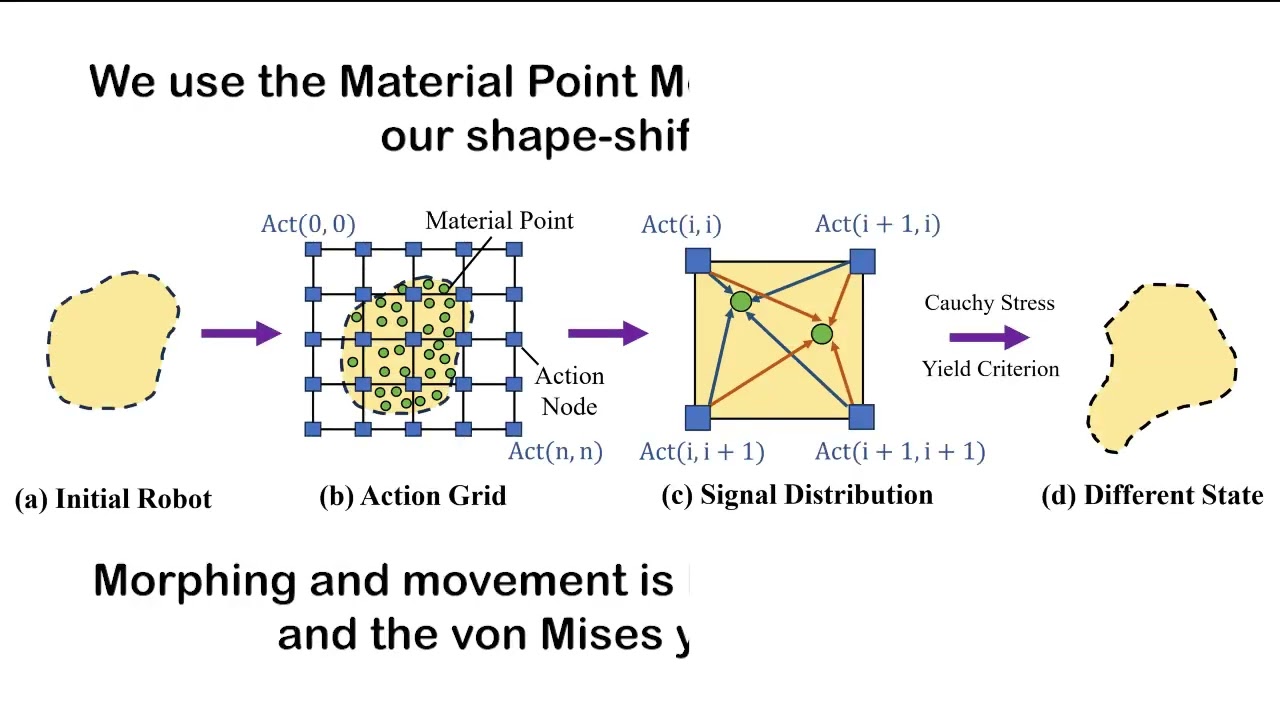
麻省理工学院的研究人员开发了一种新算法,能够控制可重构软机器人动态改变形状,以完成避障和物品取回等多种任务。他们还创建了一个模拟器,测试该算法在复杂任务中的表现,展示了其在多阶段任务中的优越性,未来有望推动软机器人在医疗和工业中的应用。
PID算法是一种经典的控制算法,在各个行业广泛应用。它通过比例、积分和微分组成部分来控制目标输出。传统的PID控制系统可以通过调整组成部分的增益来优化。随着计算机技术的发展,引入了位置、增量和阶跃PID等数字PID控制方法。这些方法离散化连续函数并降低了计算复杂性。此外,还可以使用积分分离、变速积分和控制微分等技术来优化PID算法。串级PID控制是常用的过程控制方法,其中多个PID控制器级联使用。PID控制中的三个组成部分的组合使得在实际应用中具有灵活性和适应性。
自主驾驶车队算法测试平台评估了不同控制算法的性能,结果显示分布式模型预测控制算法优于线性反馈。
VICC是一种自适应的拥塞控制算法,可提升弱网下带宽利用率和稳定性,适应不同延时需求,使用自适应Padding策略解决带宽下溢问题。经过实验验证,取得显著改善。
完成下面两步后,将自动完成登录并继续当前操作。