

大模型启示:泛化是进化能力的一次重大飞跃
极道
·



超越无限:工具使用解锁状态空间模型中的长度泛化
Apple Machine Learning Research
·
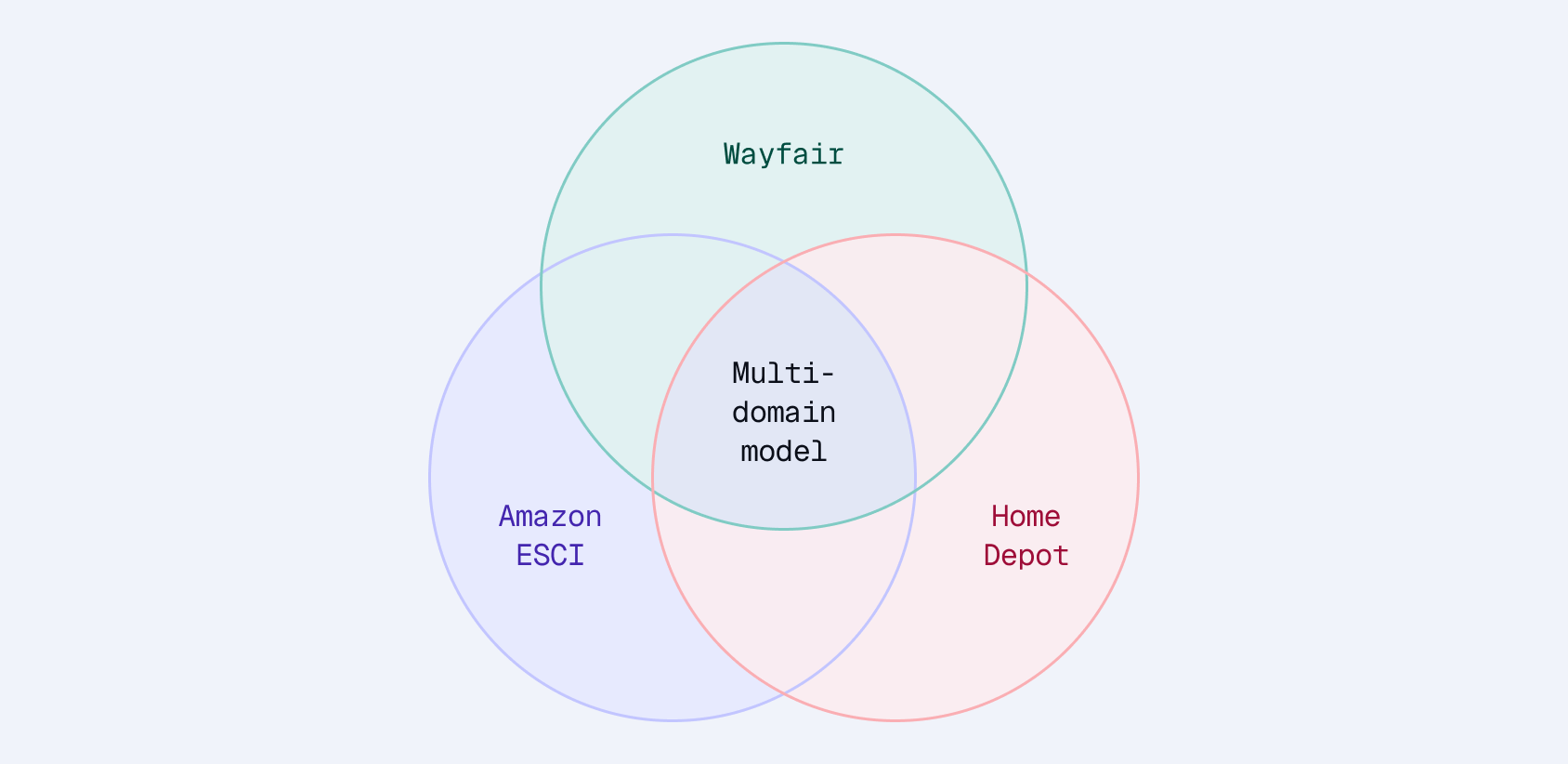
电子商务搜索中的稀疏嵌入微调 | 第4部分:专业化与泛化
Qdrant - Vector Database
·
EMBridge:通过跨模态表示学习提升肌电信号的手势泛化能力
Apple Machine Learning Research
·



语音基础模型在可穿戴传感器数据时间序列任务中的泛化
Apple Machine Learning Research
·
CPEP:对比姿态-肌电预训练提升基于肌电信号的手势泛化能力
Apple Machine Learning Research
·
关于促进扩散变换器泛化能力的归纳偏差
Apple Machine Learning Research
·
情感模型对非典型语音的泛化能力较弱
Apple Machine Learning Research
·
