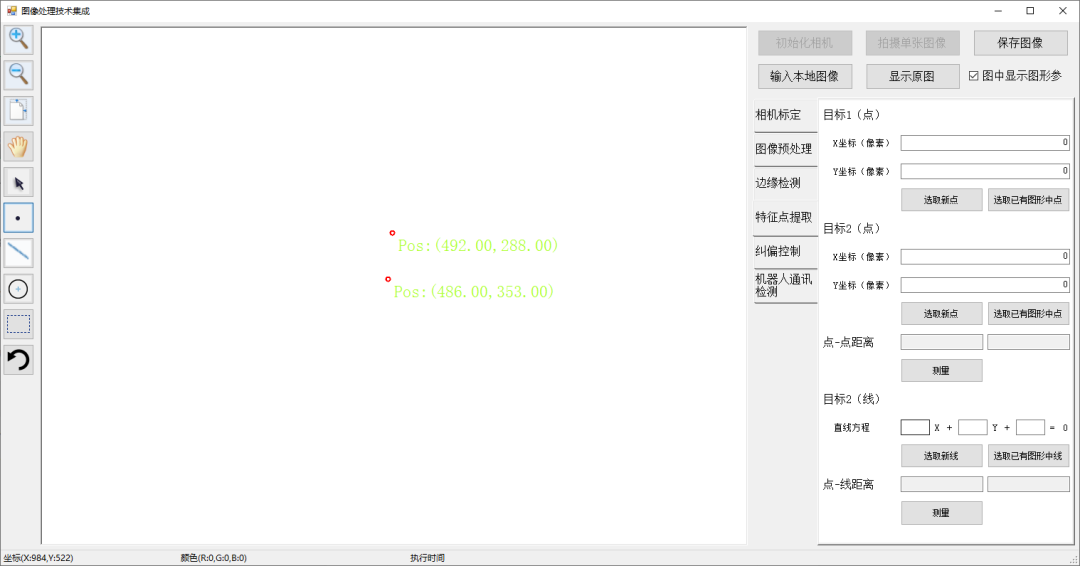
本文介绍了一款基于C#开发的图像处理与相机标定辅助系统,旨在实现高精度测量与识别。该系统支持自动和手动提取特征点,提供实时反馈,适合复杂环境下的标定。功能包括角点提取、直线拟合和动态配置标定板尺寸,界面简洁,操作直观,适合中小型项目及机器视觉学习。
该研究提出了多种相机标定方法,包括CompenNet++、SynthCal和基于高斯过程的校准,显著提高了标定精度。通过创新的自标定方法和镜面反射的利用,克服了传统方法的局限性,实验结果验证了新方法在合成和现实数据上的有效性与准确性。
本文介绍了一种新方法,通过方形平面标记同时解决定位和建图问题,优化相机标定和姿态估计。研究表明,该方法在复杂环境下表现优越,能够提高相机校准的准确性。
本文提出了多种相机标定方法,包括基于几何约束的损失函数、无标定目标方法和利用球面镜图像的高精度标定。这些方法在提高标定精度和降低计算成本方面表现优异,适用于实际应用。
本文探讨了深度学习在相机标定和定位中的应用,提出了一种基于卷积神经网络的方法,显著提高了相机姿态估计的准确性。研究分析了几何约束与深度学习的结合,以及跨视域地理定位的挑战与解决方案,强调了高质量数据在模型微调中的重要性。
该论文提出了几种相机标定和相对位姿估计的方法,采用基于几何约束的损失函数和RANSAC框架的优化策略。研究表明,这些方法在合成和实际数据集上均优于现有模型,有效解决几何优化问题并提高估计精度。
本文探讨了一种通用的扩散模型DMD,该模型能够有效建模室内外场景,减少深度估计误差。通过对数尺度深度参数化和多样化训练,DMD在零样本数据集上表现优异,并且无需额外模块即可提供可靠的不确定性估计。此外,研究提出了多种深度估计和相机标定方法,提升了三维场景的重建精度。
本文提出了一种新方法,通过数字图像相关技术从单幅图像中估计相机的标定参数,包括有效焦距和外部参数。研究表明,该方法在合成和实际数据集上相较于现有技术具有更高的准确性和可比的运行时间。
完成下面两步后,将自动完成登录并继续当前操作。