苏度科技发布了具身机器人系统Sudo R1,首次实现近100%的零样本抓取成功率。该模型通过纯仿真数据训练,无需真实数据,突破了行业瓶颈。团队与宁德时代等企业合作,计划实现多工位覆盖的机器人系统。
ClawGUI是一个开源框架,旨在解决GUI智能体的训练、评测和部署问题。它通过在线强化学习与真实设备交互,提升模型性能。ClawGUI-2B在MobileWorld基准上取得17.1 SR的成绩,显著超越基线,并支持自然语言控制手机,推动GUI智能体的实际应用。
在深圳举行的全球首届具身智能开发者大会上,20支顶尖高校队伍参加机器人对抗赛,测试模型的适配与部署能力。比赛提供高性能硬件和全流程支持,旨在推动具身智能的应用与开源生态发展。参赛者需在真实环境中完成多项任务,以检验模型的易用性与泛化能力。
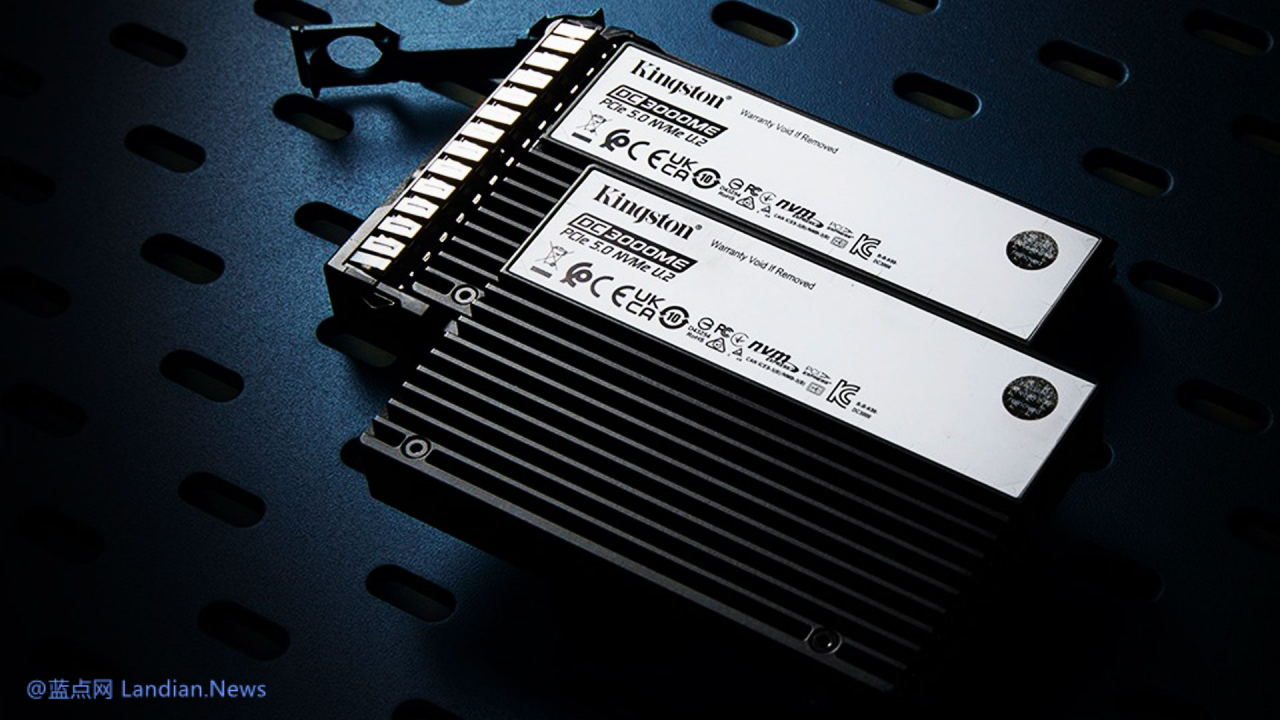
Windows 11和Windows Server 2025的NVMe驱动程序显著提升了4K和64K随机读取性能,降低了CPU使用率和延迟。用户需通过注册表启用该驱动,测试显示在高负载下性能提升明显,适合企业和个人用户。
本文介绍了RL-100,一个结合模仿学习与强化学习的机器人学习框架。该框架通过模仿学习、离线强化学习和在线微调三个阶段提升机器人操作能力,旨在提高机器人在真实环境中的可靠性和效率,支持多种控制方式,并通过一致性蒸馏技术实现高频控制,以满足工业应用需求。
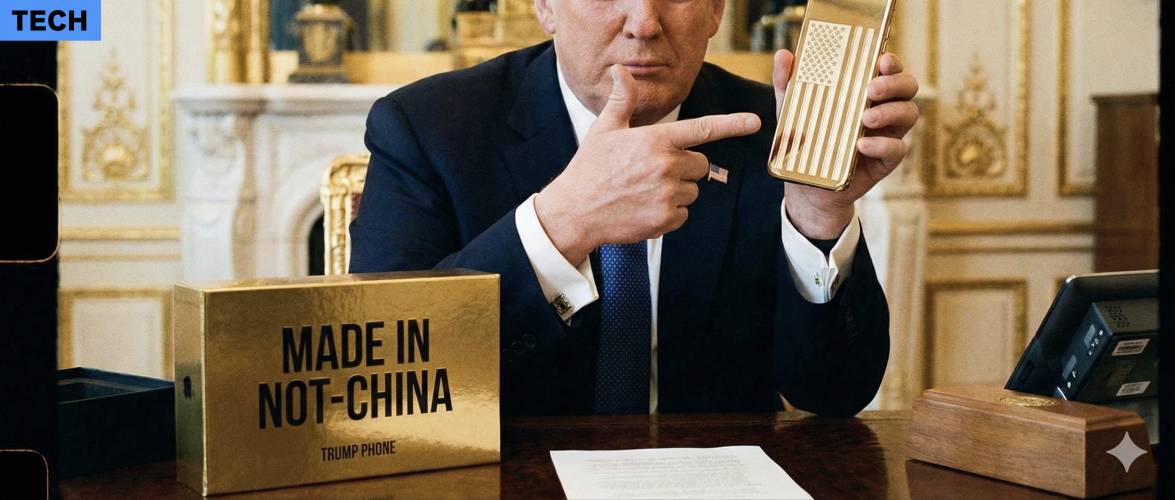
特朗普的手机Trump Phone T1即将发布,外观与宣传有明显变化,配置升级。价格预计在500至1000美元之间,手机在佛罗里达组装,反映美国手机产业链的复杂性。
AI Shortlist 是一款利用人工智能技术筛选候选人的工具,旨在提升招聘效率和准确性,通过分析简历和求职者数据,帮助企业找到合适的人才。
RoboChallenge发布年度报告,揭示大语言模型在真实物理环境中的能力与挑战。通过数万次真机测试,推动具身智能标准化,满足日益增长的验证需求。报告指出,基础任务逐渐成熟,但复杂任务成功率仍低。未来将扩展测试场景,降低验证门槛,促进技术进步。
在排查“功能异常”时,网络环境差异常常是问题原因。通过手机的USB调试功能连接电脑,可以在PC端的DevTools中查看手机的网络请求,从而快速复现问题。此方法适用于Android和iPhone,操作简单且保持真实网络环境。
睿尔曼开源全球首个高质量多模态真机数据集,旨在解决机器人研发中的数据瓶颈,推动智能机器人算法创新。数据来源于真实场景,确保高保真度和稳定性,促进机器人技术发展,构建开放共享的生态系统。
抱歉,文本内容过于简短,无法有效总结。请提供更详细的文章内容。
RoboChallenge组委会于2025年11月20日成立,旨在推动具身智能的评测标准化,整合行业资源,建立高效透明的评测生态,促进技术与产业需求的对接,推动AI技术的发展。
RoboChallenge组委会成立,旨在科学、公正地评估具身智能技术,推动标准化评测体系,促进技术与产业需求的连接,构建透明、公正的评测生态,助力行业发展。
本文介绍了英伟达GR00T N1.5的升级与应用,强调其在机器人语言理解和视觉处理方面的显著提升。N1.5通过Eagle-2模型增强了文本和视觉的编码能力,提高了任务执行的准确性和效率。文章还分享了在长沙举办的线下营中,团队如何解决部署过程中的问题,并展示了N1.5在实际操作中的应用案例,如纸巾抓取。
iPhone 17国行版可能无法首发,苹果计划于9月10日发布新机。威马汽车宣布复产并推出新车型。特斯拉马斯克透露新AI芯片进展,宝马CFO对中国市场充满信心。OpenAI重组团队以提升ChatGPT个性。
本文探讨了现实世界机器人强化学习的挑战与解决方案,介绍了开源框架SERL,旨在提高样本效率并支持多任务。SERL结合高效算法RLPD,提供奖励函数设计和自动重置机制,促进机器人学习的应用。
机器之心数据服务现已上线,提供高效稳定的数据获取,简化数据爬取流程。
本文分析了π0模型在机器人控制中的应用,重点介绍了模型的配置、训练、推理及注意力机制优化,并强调了与LeRobot框架的集成及多模态输入处理。
本文介绍了LeRobot ACT和ALOHA ACT的智能分拣策略,重点在于动作序列预测算法的实现。通过多模态Transformer架构,模型能够同时预测未来动作,从而提升机器人在复杂任务中的协调性和连贯性。核心组件包括VAE编码器和Transformer解码器,支持多种输入特征,确保机器人执行精准的动作序列。
OpenAI与前苹果设计官合作开发一款神秘AI硬件,外形类似iPod Shuffle,无屏幕,具备环境交互功能,计划量产1亿台。该产品可与智能手机和PC联动,设计引发网友猜测。
完成下面两步后,将自动完成登录并继续当前操作。