本研究提出了一种神经符号方法,旨在提升视频理解系统在事件推理和决策方面的能力。该方法通过将视频查询分解为基本事件并结构化为连贯序列,增强了系统的可解释性和推理能力,推动智能视频代理的发展。
本研究提出了一种神经符号方法$Π$-NeSy,将神经网络的低级感知任务与基于可能性的规则系统的高级推理任务结合,旨在推导输入实例属于目标概念的可能性程度。实验证明该方法在解决MNIST加法和数独问题时优于现有方法。
本研究提出了一种结合知识图谱和分层规划的神经符号方法,以解决大型语言模型在复杂任务中的不足。该方法通过符号验证器确保计划的正确性,并在实验中显示出显著的推理和组合能力提升。
本研究提出了一种结合神经网络与符号知识的神经符号方法,提升了对COVID-19期间社交媒体心理健康情感的分析能力。该方法在大规模数据集上表现优异,F1分数超过92%,有效支持健康监测任务。
这篇研究论文介绍了一种基于神经符号方法的学习转译技术,能够有效将汇编代码转换为其他编程语言,其转译成功率显著高于GPT-4和传统转译器。研究还探讨了无监督领域适应、视觉表示的鲁棒性和过程步骤识别等主题,提出了新的算法和数据集,以提高工业应用中的效率和准确性。
本文探讨了大型语言模型(LLMs)在逻辑推理中的应用与局限,提出结合神经符号方法以提升推理能力。研究表明,现有LLMs在复杂推理和上下文理解方面表现不佳。通过构建数据集和新模型,验证了逻辑训练的有效性,旨在改善LLMs在符号推理任务中的表现。
该论文提出了一种新颖的神经符号方法,通过增强变分自编码器模型,实现基于感官输入的符号运算符学习,验证了自主任务和运动规划的可行性。同时,研究了电动车电池回收利用的健康监测算法,展示了其在电网能量存储中的潜力。
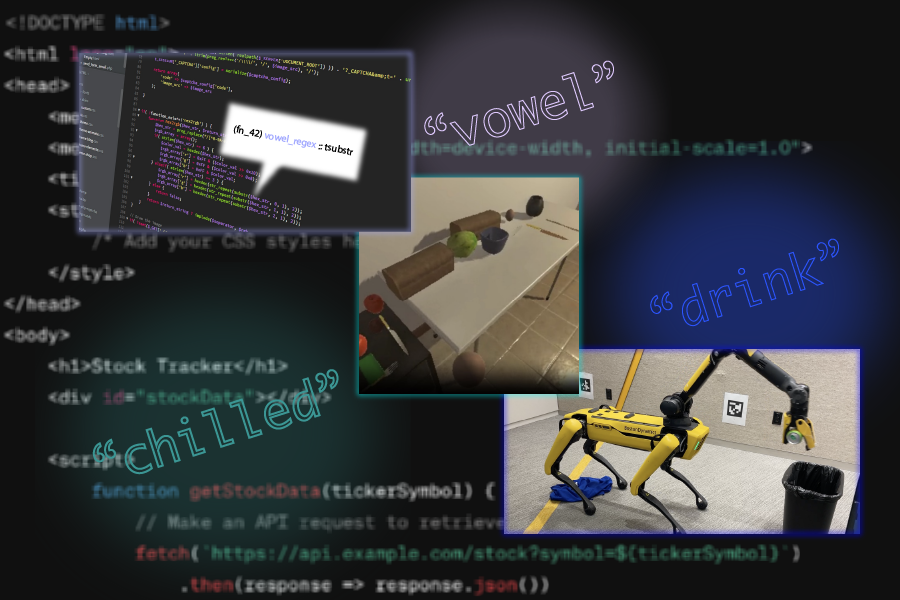
麻省理工学院计算机科学与人工智能实验室的研究人员提出了三种神经符号方法,旨在帮助语言模型在自然语言中找到更好的抽象。这些方法通过自然语言提供上下文,提升了编程、人工智能规划和机器人任务的执行能力。LILO、Ada和LGA分别用于代码合成、任务规划和机器人导航,显著提高了任务准确性,展示了自然语言在复杂任务中的重要性。
本文介绍了一种通过KANDY基准框架生成多种学习和推理任务的方法,特别关注符号组合性。实验评估发现,神经模型和纯符号方法在解决任务时存在困难,需要应用先进的神经符号方法。
本文提出了一种神经符号方法,将图像处理为对象,并学习关系和逻辑规则。通过可微分层,确定符号关系和规则。模型评估结果表明,该方法优于其他符号学习者和深度关系神经网络架构。
本文介绍了自动驾驶背景下的视觉意义建模需求和潜力,并提出了一种通用的神经符号方法,用于在线视觉意义建模。该方法整合了最先进的视觉计算技术和深度语义学习,可在混合体系结构下实时感知和控制。在多个基准测试中进行了评估和论证。
完成下面两步后,将自动完成登录并继续当前操作。