代理人工智能是一种自主规划和执行多步骤工作流程的系统,旨在实现特定目标并减少人类干预。与传统AI不同,代理AI能够持续感知环境、推理目标并根据结果调整行为。它在企业中自动化复杂任务,如客户服务、软件开发和供应链管理,从而提升效率和决策质量。代理系统通过协调多个代理,确保任务顺利完成,适用于重复性高、数据可用性强的工作流程。
代理人工智能(Agentic AI)是能够自主规划、行动和自我改进的系统,代表了AI的重大进步。与传统模型不同,代理AI具备多步骤自主性,能够设定目标、执行计划并总结结果。其核心模块包括规划、记忆和工具使用,使其能够适应环境并持续学习,从而提高效率和准确性。
现代AI代理模型已内化ReAct框架,具备自主规划和工具调用能力。ReAct强调思考、行动和观察的循环,使AI能够像人类一样解决复杂问题,提升智能和可靠性,无需详细提示词。
波士顿动力的Atlas机器人升级为Atlas MTS,具备自然语言理解、自主规划和应对意外的能力。新模型基于大型行为模型(LBM),采用4.5亿参数的扩散Transformer,能够精准执行人类演示的动作。这次升级标志着机器人从液压驱动转向电驱动,提升了性能和适应性。
2025世界机器人大会将于8月在北京举行,澳鹏数据分享了具身智能数据基础设施的创新实践。副总裁钱程强调数据是AI大模型与具身智能融合的核心,呼吁推动具身智能机器人快速量产。澳鹏推出RoboGo平台,结合多视角3D重建与视频理解,提升机器人操作精度与自主规划能力。
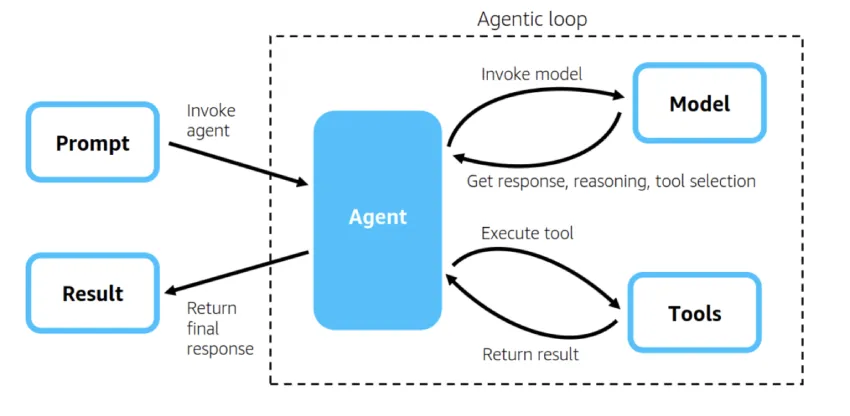
亚马逊网络服务开源了Strands Agents SDK,旨在简化AI代理的开发。该SDK由模型、工具和提示三部分组成,支持自主规划和交互,集成多种模型和工具,适用于多种应用场景,从而提升开发效率和灵活性。
本研究提出了改进算法AoT+,有效解决了大语言模型在自主规划中的不足,使其在规划基准测试中超越了以往方法和人类基准,展现了生成长期计划的能力。
本研究探讨了语言智能体在自主规划中的主要障碍,指出约束条件的有限作用和问题影响的减弱是关键因素。尽管现有策略有所改善,但仍未完全解决这些挑战,表明智能体在达到人类水平智能之前面临重大困难。
本文探讨了大型语言模型(LLMs)在自主规划中的应用与挑战。研究表明,LLMs在自主规划能力上存在局限,但在启发式模式下能够改善其他智能计划器的搜索过程。通过实验,提出了混合方法SimPlan,其性能优于现有的LLMs规划器。
本文研究了LLLms在常识规划任务中的能力,通过国际计划竞赛评估了其在自主规划和启发式模式下的表现。发现LLLms在自主规划方面有限,但在启发式模式下,其生成的计划可以改善搜索过程并提供反馈验证计划质量。
完成下面两步后,将自动完成登录并继续当前操作。