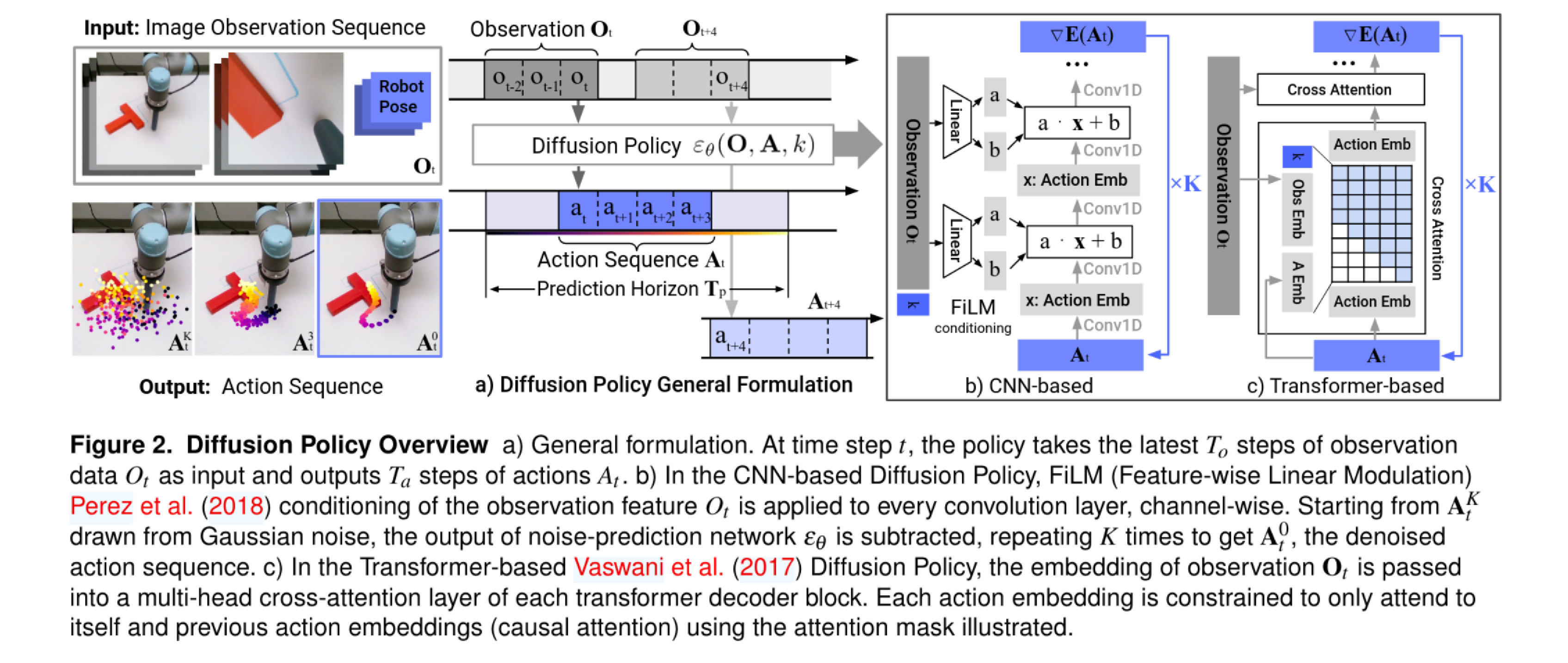
本文讨论了Diffusion Policy在机器人动作规划中的应用。通过神经网络预测噪声并逐步去噪,机器人能够生成精准的动作轨迹。尽管面临视觉遮挡和物理干扰,机器人依然能重新规划路径,展现出强大的适应能力。研究表明,该模型在学习物理系统动力学方面表现出色。
完成下面两步后,将自动完成登录并继续当前操作。