本研究提出了一种新型多模态掩码自编码器EmbodiedMAE,旨在缩小机器人操控中训练数据与实际任务之间的领域差距。该模型通过学习RGB、深度和点云表示,在DROID-3D数据集上进行训练,实验结果显示其在70个仿真任务和20个现实任务中表现优异,展现出良好的桌面操控应用潜力。
本研究提出DistinctAD框架,旨在解决音频描述生成中的领域差距和冗余问题。通过CLIP-AD适应策略和注意力模块,显著提高了音频描述的质量和独特性。
本文研究异构人脸识别,提出条件自适应实例调制模块(CAIM),有效适应不同源模态,缩小领域差距。通过广泛评估,证明该方法在多个基准测试中优于现有技术,成功实现端到端训练,且所需成对样本数量最少。
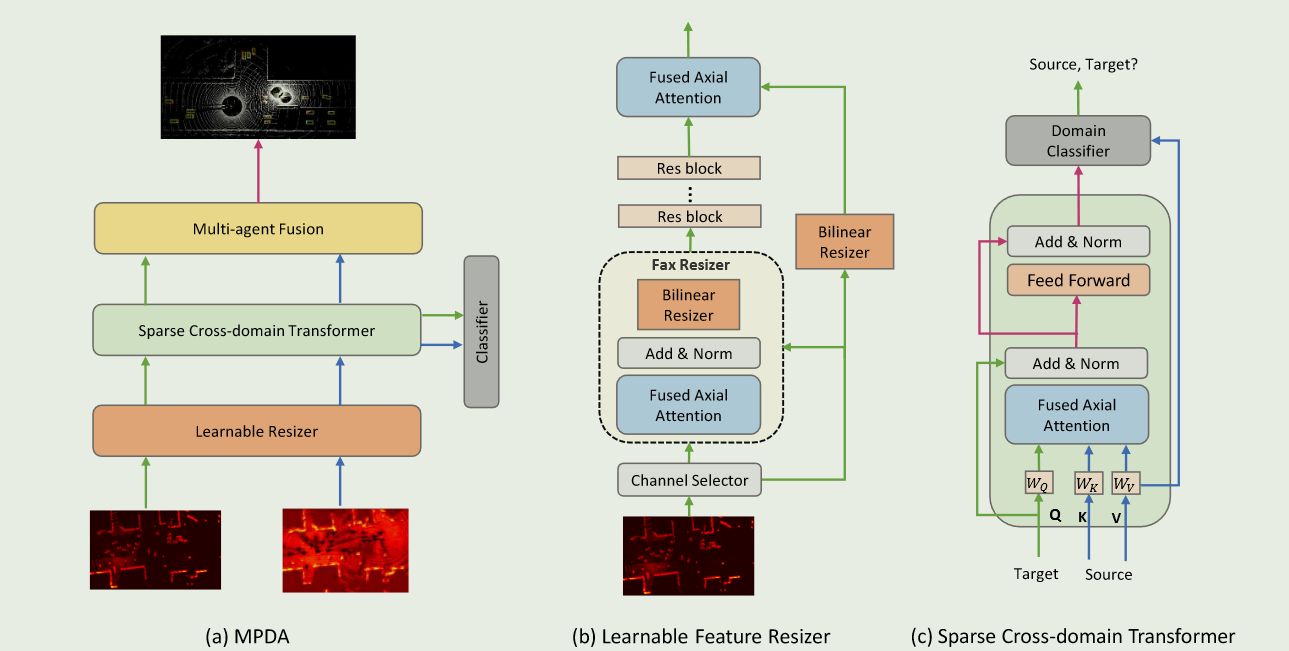
本文介绍了三篇关于多智能体感知的研究,分别解决了领域差距、模型适应和仿真到现实迁移学习问题。这些研究提出了有效的解决方案,对多智能体感知的发展具有重要意义。
完成下面两步后,将自动完成登录并继续当前操作。