
协同感知学习(二)
原文中文,约8900字,阅读约需22分钟。
📝
内容提要
本文介绍了三篇关于多智能体感知的研究,分别解决了领域差距、模型适应和仿真到现实迁移学习问题。这些研究提出了有效的解决方案,对多智能体感知的发展具有重要意义。
🎯
关键要点
-
本文介绍了三篇关于多智能体感知的研究,解决了领域差距、模型适应和仿真到现实迁移学习问题。
-
现有多智能体感知算法假设所有智能体具有相同的神经网络,这在现实中不实用。
-
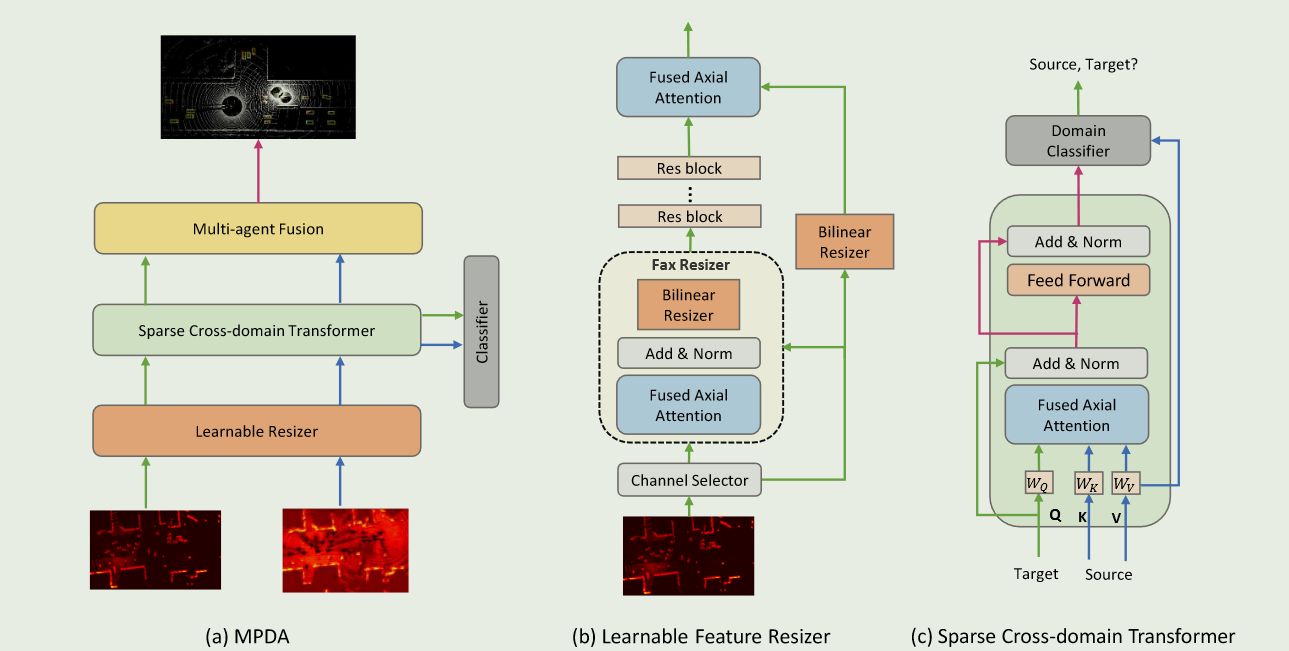
提出了一个轻量级框架来弥合领域鸿沟,能够有效提高多智能体感知性能。
-
通过共享视觉信息,多智能体感知系统显著提高了单智能体系统的性能。
-
MACP框架使预训练的单个代理模型具备合作能力,减少了可调参数和通信成本。
-
DI-V2X通过蒸馏框架学习领域不变表征,提升V2X 3D物体检测性能。
-
S2R-ViT框架考虑了仿真数据和真实数据之间的部署差距和特征差距,提升了多智能体协作感知的性能。
-
研究表明,仿真到现实的领域差距包括部署间隙和特征间隙,影响感知性能。
❓
延伸问答
多智能体感知中领域差距的影响是什么?
领域差距会导致多智能体感知性能下降,尤其是在不同模型之间共享特征时。
如何弥合多智能体感知中的领域鸿沟?
可以通过轻量级框架和可学习的特征成形模来对齐特征,从而弥合领域鸿沟。
MACP框架的主要功能是什么?
MACP框架使预训练的单个代理模型具备合作能力,减少可调参数和通信成本。
DI-V2X框架如何提升V2X 3D物体检测性能?
DI-V2X通过蒸馏框架学习领域不变表征,减轻领域差异,从而提升检测性能。
S2R-ViT框架的创新点是什么?
S2R-ViT框架同时考虑了部署间隙和特征间隙,利用模拟和真实数据进行迁移学习。
多智能体感知系统如何提高单智能体系统的性能?
通过共享视觉信息,多智能体感知系统能够透视遮挡并感知更远的范围,从而显著提高性能。
🏷️
