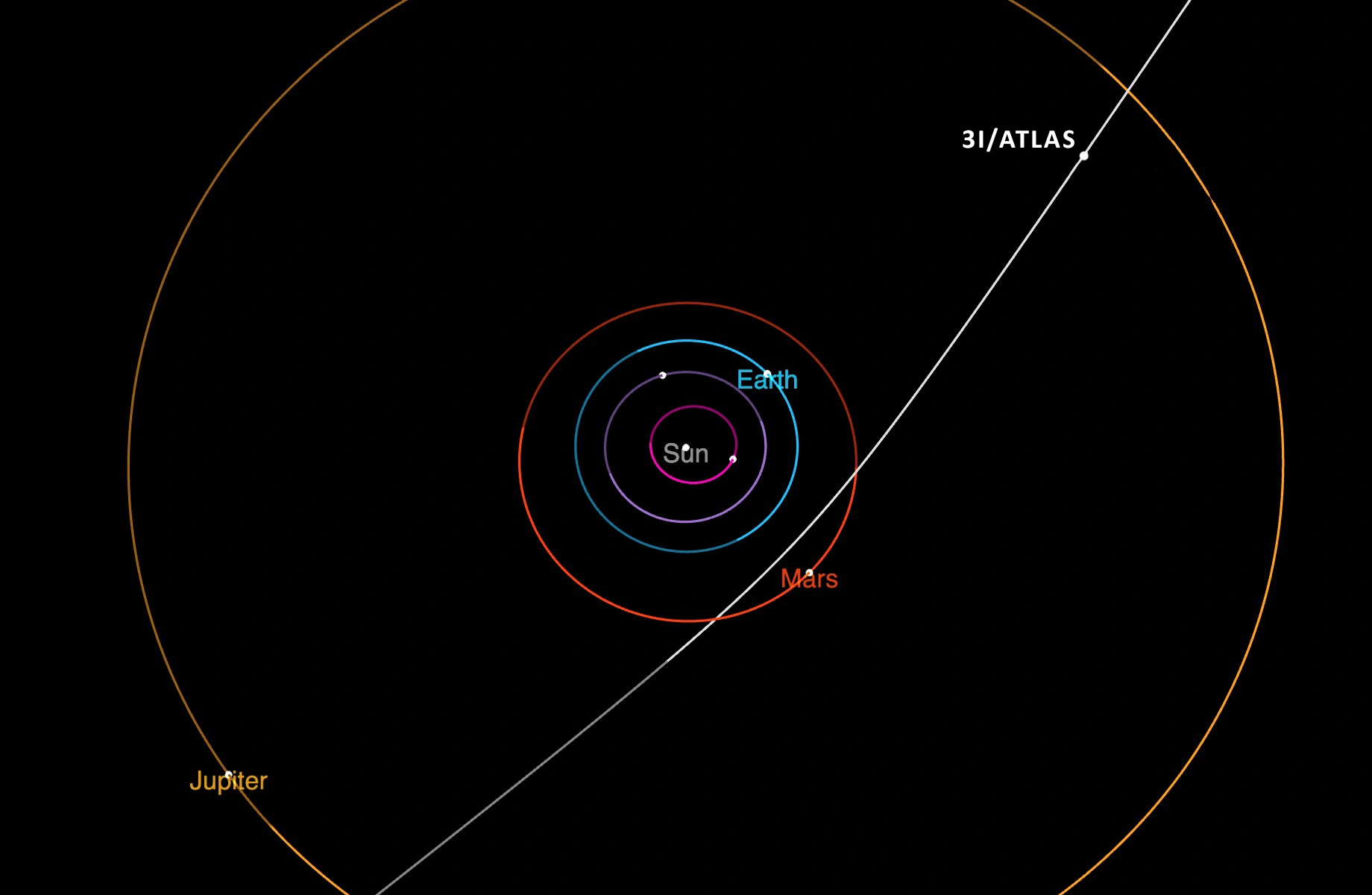
天体物理学家将星际天体A11pl3Z命名为3I/ATLAS,飞行速度为每秒58.67千米,疑似来自银河系中心黑洞方向。该天体可能是某恒星系统甩出的彗星,距离太阳6.69亿千米,预计在10月抵达近日点,届时将获得更多观测数据。
南洋理工大学与A*STAR研究团队提出了新型局部鲁棒图像水印方法MaskMark,其训练成本仅为传统方法的1/15。该方法支持多水印嵌入和精准定位篡改区域,适用于整体和局部内容保护,表现优于现有模型,具备高效性和扩展性。
本文介绍了如何在有障碍物的二维网格中使用A*搜索算法找到最短路径。通过计算曼哈顿距离和验证移动的有效性,算法能够有效探索邻近节点并重建从起点到目标的路径。
本研究提出了一种高效并行化的多目标A*搜索框架,解决了多目标最短路径问题,实验结果显示该框架显著提升了A*算法的性能。
本研究提出了一种新颖的三维路径规划方法,针对自主水下航行器在复杂环境中的能耗、控制和导航问题,整合局部尾流与全球水流,能耗降低最多11.3%。
本文研究了一个路径规划问题,针对现有的基于格点的规划方法效率低下的问题,提出了一种新颖的MeshA*算法。这种算法在保证完整性和最优性的前提下,显著提高了运行效率,实现了比传统方法快1.5倍的运行时间,同时引入了一种额外的剪枝技术以进一步减少搜索空间。
本研究探讨了基于规则的方法与GNN架构NBFNet和A*Net在知识图谱补全中的预测性能差异。我们发现,这种性能差异大部分可以通过每个数据集中隐藏的独特负模式来解释。这一发现为不同模型类别在知识图谱补全中的性能差异提供了独特视角:模型通过针对错误事实的得分进行惩罚,而不是仅仅提供正确事实的高得分,从而获得预测性能的优势。
本文介绍了如何使用Python、Matplotlib和A*算法构建简单的无人机导航系统。通过创建和可视化2D迷宫,读者将学习AI基本术语、迷宫生成、A*算法及无人机路径的实现与可视化,最终获得一个解决迷宫的无人机导航系统。
本文介绍了基于深度学习和视觉技术的自主导航系统,重点讨论了动态障碍物跟踪、路径规划和控制等方面。这些系统在复杂环境中有效提升了导航的安全性和效率,推动了自主水下航行器和无人水面艇的发展。
该研究提出了Differentiable Average Lagging (DAL)模型,用于追踪同步系统延迟,应用于机器翻译和语音转录。文章探讨了同步文本与语音翻译结合的方法,提出新的评估指标LAAL和ATD,分析翻译质量与延迟的权衡,旨在改善实时语音翻译的性能和评估框架。
本文提出了多种算法解决带权有向图的最短路径问题,包括改进的A*算法和基于平衡二叉搜索树的方法。这些算法在时间和空间效率上优于传统方法,适用于多目标优化和实时路径规划,尤其在公交运输系统中表现突出。
本文介绍了多智能体 A*(MAA*)算法,旨在解决有限时间视野下的分散式部分可观测马尔可夫决策问题(DEC-POMDP)。该算法适用于多机器人协调和网络流量控制等合作代理的最优规划。同时,研究探讨了基于模拟的 POMDP 求解器和近似策略迭代算法在不完全信息环境中的应用,展示了现代启发式搜索方法的高效性。
A*和Q*是两种不同的AI算法,A*是一种寻路和图遍历算法,适用于视频游戏中的NPC移动、GPS系统中的路线映射和机器人导航;Q*是一种无模型强化学习算法,适用于股票交易算法、自动驾驶汽车和自适应控制系统。A*适用于确定性问题,Q*适用于随机环境。A*是静态算法,Q*是学习算法。A*以高效著称,Q*寻求最优策略。A*的计算复杂度低于Q*。
本文介绍了Dijkstra算法和A*算法在已知拓扑路径的情况下搜索最短路径的方法,以及它们在路由算法、网络传输优化和GPS导航系统等应用场景中的优势。
MongoDB简化了客户的合作伙伴生态系统,并表彰了合作伙伴的卓越成就。合作伙伴分为五个不同的类别:技术合作伙伴、支持合作伙伴、云合作伙伴、市场合作伙伴和解决方案合作伙伴。MongoDB还表彰了全球合作伙伴的卓越成功。此外,MongoDB推出了MongoDB AI创新者计划,为构建人工智能技术的组织提供支持。
最近剛好有需求研究A*路徑搜尋,查找了許多範例,發現地圖格式幾乎都是二維陣列,和我們定義的地圖格式不同,考量到... Continue Reading →
完成下面两步后,将自动完成登录并继续当前操作。