本文探讨了思维链(CoT)与潜在思维(循环Transformer)的差异。思维链适合透明性高的任务,但效率较低;潜在思维则通过并行计算提高速度,适合复杂任务。两者互补,未来AI应结合这两种能力,以提升效率和探索性。
GigaBrain-0是一种新型视觉-语言-动作(VLA)模型,旨在通过整合视觉输入、自然语言指令和运动控制,提升机器人在多样环境中的操作能力。该模型利用生成的数据,降低对真实世界数据的依赖,提高泛化能力和数据效率。GigaBrain-0采用混合架构,增强空间感知能力,并通过生成中间推理步骤,模拟人类问题解决过程,实现更精确的操作和决策。
机器之心数据服务现已上线,提供高效稳定的数据获取服务,简化数据爬取流程。
Amazon Redshift 是一种云数据仓库服务,支持大规模数据分析。结合 Amazon Q Developer CLI 和多个 MCP Tool,优化了运维效率,提升了性能和问题排查能力。通过思维链方法协调任务规划,确保满足用户需求。
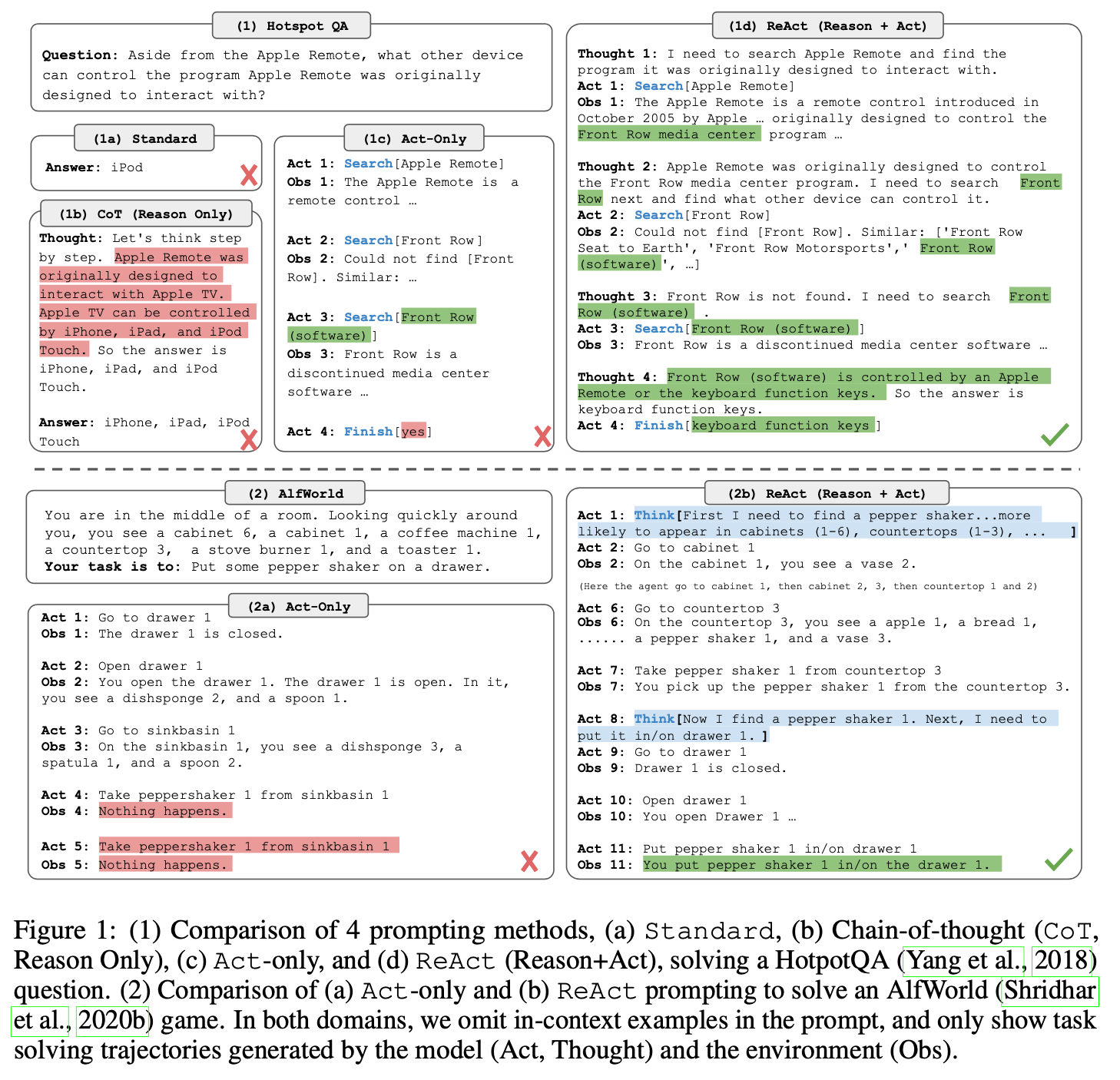
本文总结了对几篇大模型(LLM)论文的理解,重点讨论了COT和REACT方法。尽管这些论文发表于2022年,但随着大模型的快速发展,许多示例已不再适用。通过代码验证,展示了COT的推理过程和REACT的工具调用,强调了Prompt设计的重要性。最后,探讨了如何结合推理与工具以提升大模型的输出效果。
本文总结了思维链(CoT)和 ReAct 两种大模型应用范式。CoT 通过逐步推理提升模型在复杂问题上的准确性,而 ReAct 则结合思考与行动,使模型能够与外部世界交互,克服知识过时等问题。这两种方法的演进展示了从封闭知识库到智能代理的转变,强调了推理能力与可控性之间的平衡。
本研究提出了CoT-Kinetics能量方程,旨在解决大规模推理模型在评估输出质量时忽视推理过程合理性的问题。通过量化推理阶段,提升模型在复杂任务中的推理能力。
本研究针对大型推理模型(LRMs)面临的全面CoT数据集缺乏的问题,提出了OmniThought,一个包含200万条CoT过程的数据集,经过两个强大的LRMs验证生成。每个CoT过程被标注了新的推理丰富性(RV)和认知难度(CD)评分,显著提升了LRMs在复杂任务训练中的有效性,进而推动了LRMs的开发和训练。
机器之心数据服务现已上线,提供高效稳定的数据获取,简化数据爬取流程。
本研究解决了大语言模型在复杂任务中推理链的生成可靠性低和自然语言推理链干扰推理逻辑的主要问题。提出的新框架CoT-RAG通过知识图谱驱动的推理链生成、可学习的知识案例感知检索增强生成和伪程序提示执行,显著提升了推理准确性,且在多个数据集上表现出强大的实际应用价值和可扩展性。
本研究提出了一种新方法,通过自适应问题难度生成高质量链式思维(CoT)数据,以解决大型语言模型在复杂任务中的推理能力不均衡问题。该方法显著降低了数据生成成本,提高了模型微调效率,并在数学竞赛和代码生成领域验证了其有效性。
本研究提出了PRIMEDrive-CoT框架,旨在解决自驾模型在不确定性场景中的不足。该框架结合激光雷达与多视角RGB信息,通过贝叶斯图神经网络实现目标交互的概率推理,提升了场景理解的可解释性与可靠性。研究结果表明,PRIMEDrive-CoT在DriveCoT数据集上优于现有模型,展示了在复杂环境中处理不确定性的潜力。
本研究针对现有视觉-语言-动作模型在复杂操作任务中缺乏推理能力的问题,提出了一种将显式视觉链思维推理(CoT)融入模型的新方法。通过预测未来图像帧作为视觉目标并生成短的动作序列,CoT-VLA实现了在现实操作任务中相较于最先进模型提高了17%的性能,展现出显著的影响力。
基于思维链训练的大语言模型显著提升了推理的泛化能力,适用于内外部场景。研究表明数据分布的关键因素影响模型的系统性泛化,并在噪声数据下保持鲁棒性,为模型调优策略提供了重要见解。
本研究提出CoT-Drive,通过大型语言模型和链式思维提示,提升自动驾驶中的运动预测准确性。采用知识蒸馏策略,将场景理解能力转移至轻量级模型,实现实时操作,显著增强复杂交通环境中的预测准确性和鲁棒性。
对o3-Mini-High、Claude Sonnet 3.7、Grok 3 Think和Deep Seek R1进行比较,Grok 3在数学和编码任务中表现最佳,Claude Sonnet 3.7在推理和写作方面表现突出。选择合适的模型需根据具体需求。
完成下面两步后,将自动完成登录并继续当前操作。