原力灵机 DM0 模型通过 MemoryVLA 和 Real-time VLA 技术,获得 NVIDIA 和 Pi 的认可,显著提升了机器人的智能和反应速度,有效解决了记忆与速度问题,推动了机器人智能的发展。
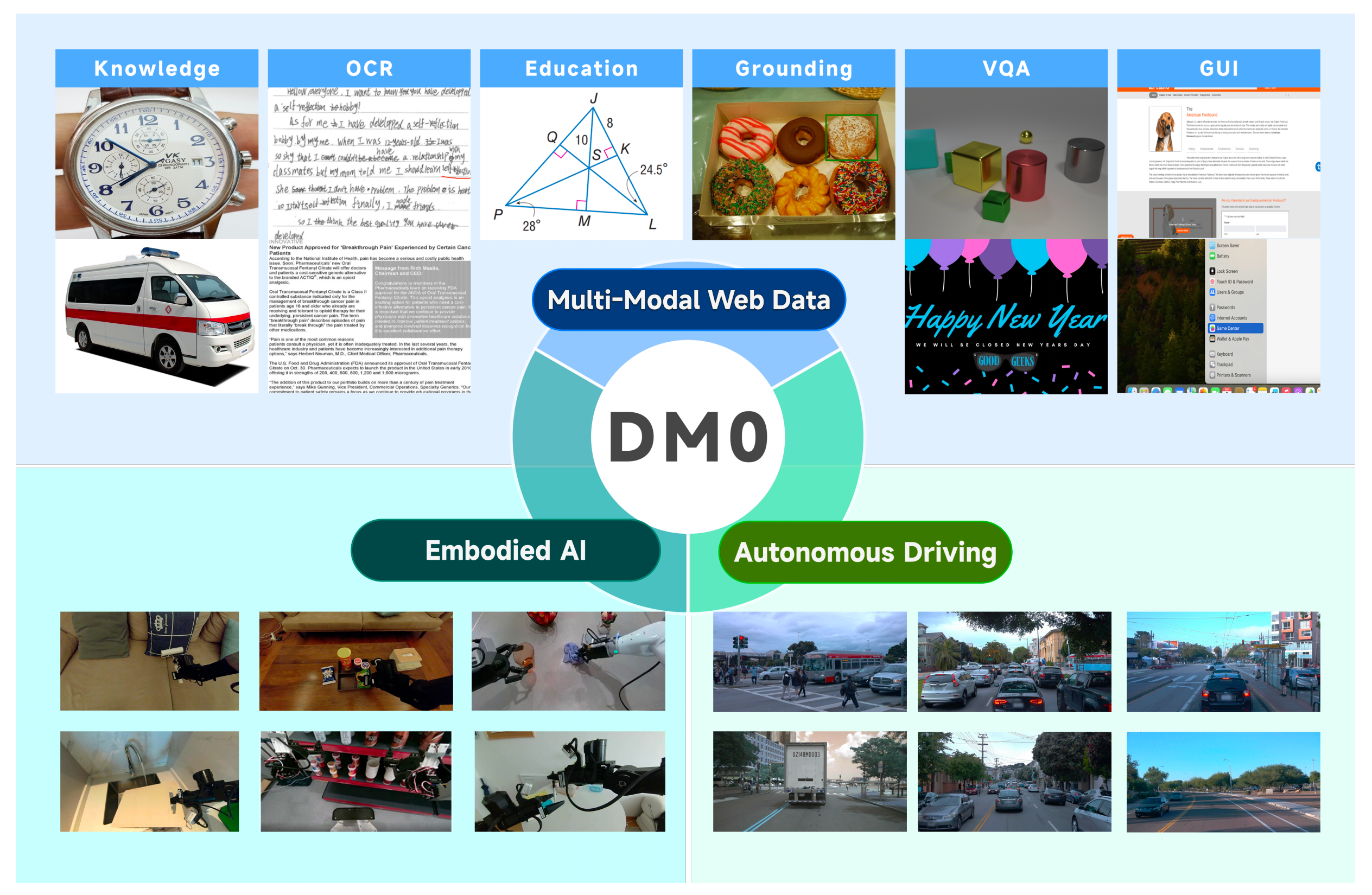
本文介绍了DM0模型,这是一种面向体感智能的视觉-语言-动作(VLA)框架,旨在统一操作与导航。DM0通过多源三阶段训练流程,结合视觉、驾驶和体感数据,克服了传统模型的局限性,并在RoboChallenge基准测试中表现优异,展示了其在物理AI领域的潜力。
原力灵机推出了具身原生模型DM0,参数仅2.4B,能够实时处理复杂任务。创始人周而进强调从零训练的重要性,模型通过多源数据和空间推理实现闭环智能,旨在提升机器人在物理世界中的操作能力。
原力灵机在北京发布了三大核心产品:具身原生大模型DM0、开发框架Dexbotic 2.0和量产工作流DFOL,标志着具身智能新时代的到来。DM0以2.4B参数量在全球评测中获胜,具备高智能密度和多任务能力。Dexbotic 2.0支持模块化架构和多源数据训练,促进开发者创新。DFOL通过数据回流机制提升机器人在工厂的应用效率,推动具身智能的规模化落地。
完成下面两步后,将自动完成登录并继续当前操作。