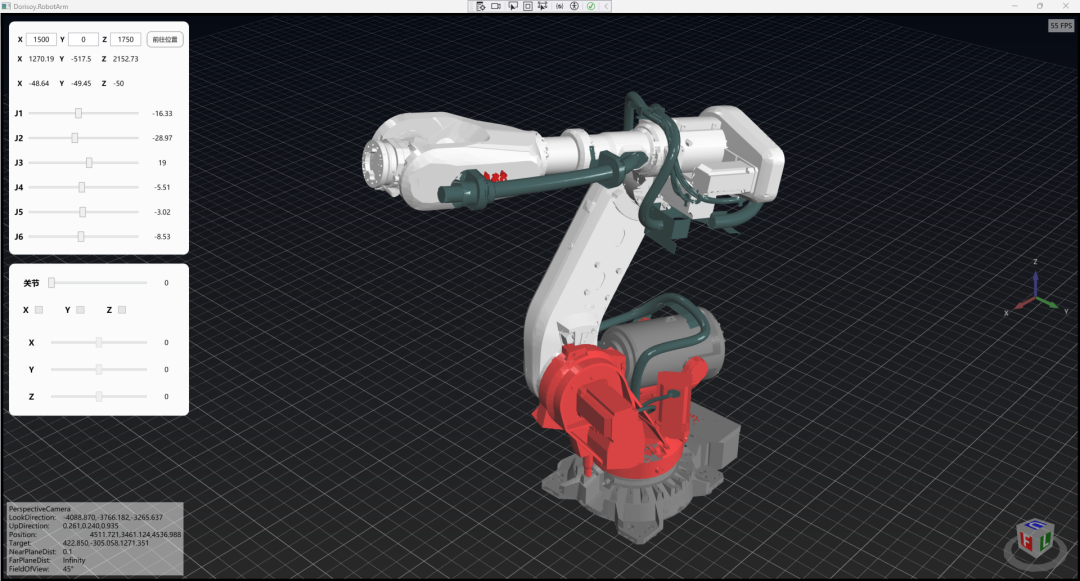
基于C# .NET 8.0和WPF的工业机器人3D仿真系统,支持正逆运动学计算,具备手动控制、自动目标到达和关节调试功能,使用HelixToolkit实现高效渲染,适合学习和工程验证。
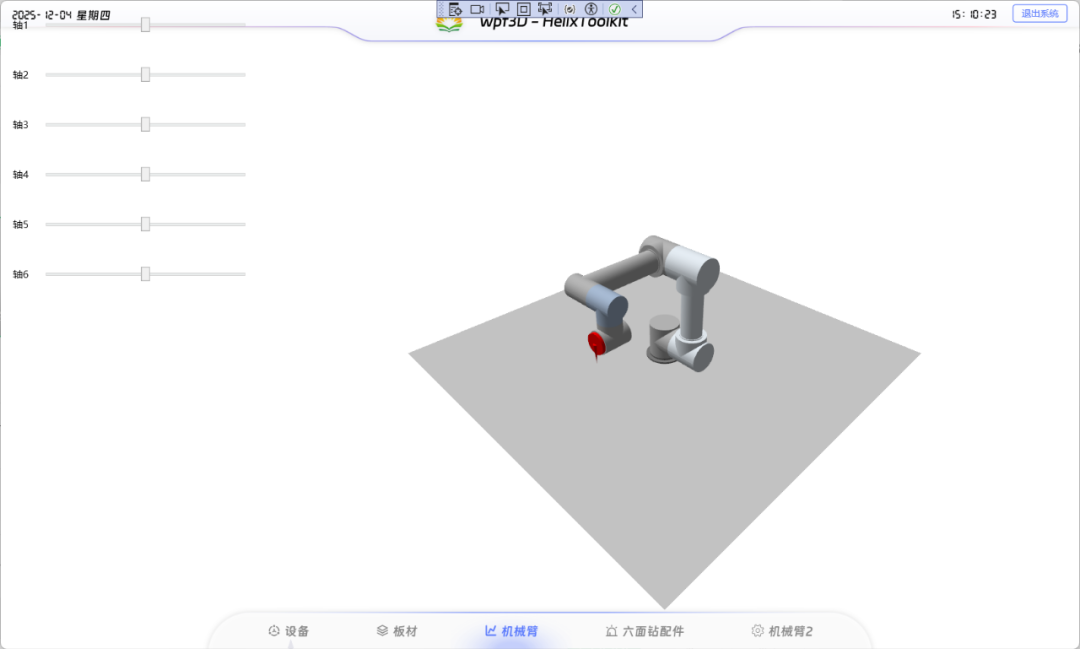
本文介绍了如何在WPF中使用HelixToolkit实现3D设备监控界面,主要用于模拟数控设备的钻包布局与动态动作。项目动态生成钻头模型,支持交互控制和实时状态反馈,具备模块化设计和真实物理模拟,适合工业3D可视化应用。
完成下面两步后,将自动完成登录并继续当前操作。