
.NET 8 + WPF 做工业机器人3D仿真?HelixToolkit 真香
内容提要
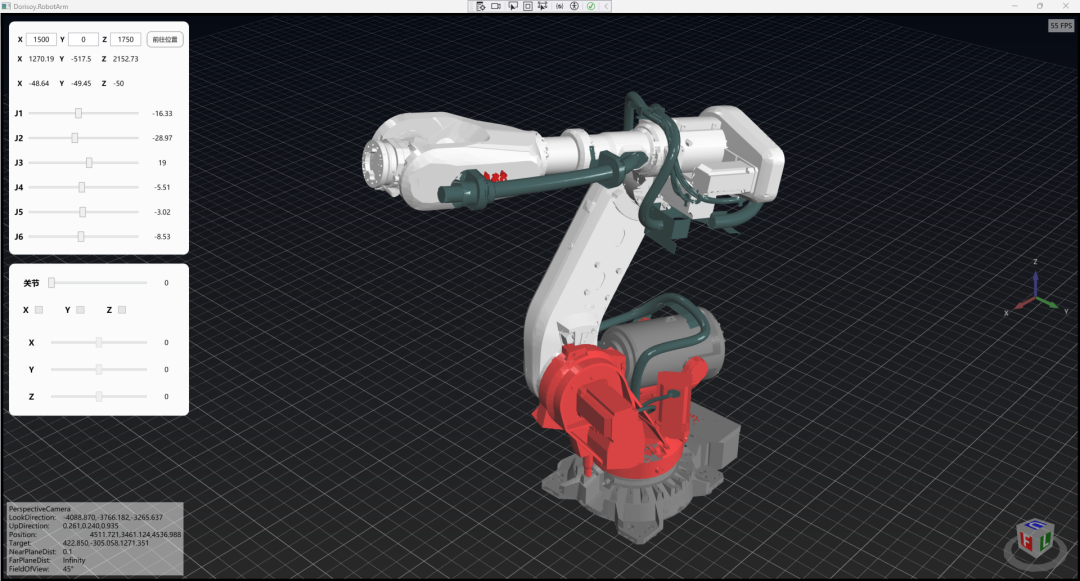
基于C# .NET 8.0和WPF的工业机器人3D仿真系统,支持正逆运动学计算,具备手动控制、自动目标到达和关节调试功能,使用HelixToolkit实现高效渲染,适合学习和工程验证。
关键要点
-
基于 C# .NET 8.0 和 WPF 的工业机器人3D仿真系统,支持正逆运动学计算。
-
项目是一个完整的机器人机械臂3D仿真应用,使用 HelixToolkit 实现高性能渲染。
-
系统功能包括手动关节控制、自动目标点到达和关节调试可视化。
-
支持正运动学(FK)和逆运动学(IK)计算,实时显示末端执行器位置。
-
通过滑块实时调整关节角度,机械臂姿态即时更新。
-
提供可视化调试辅助,标示当前选中关节的旋转中心。
-
支持两种 ABB 工业机械臂型号:IRB 4600 和 IRB 6700。
-
项目使用 .NET 8.0、WPF 和 HelixToolkit,推荐使用 Visual Studio 2022 开发。
-
逆运动学算法基于梯度下降法,参考相关教程实现。
-
项目结构清晰,代码注释详尽,易于理解与二次开发。
-
提供详细的安装和运行步骤,支持用户自定义机械臂型号。
-
设计理念为轻量、透明、可学习、可扩展,适合学习和工程验证。
延伸解读
技术背景与应用场景
该工业机器人3D仿真系统基于C# .NET 8.0和WPF开发,适合用于教育和工程验证。通过支持正逆运动学计算,用户可以直观地理解机械臂的运动原理,适合机器人技术的学习和研究。
功能与用户体验
系统提供手动控制和自动目标到达功能,用户可以通过滑块实时调整关节角度,增强了交互性。可视化调试辅助功能使得用户在调试过程中更容易理解关节的运动和旋转中心,提升了使用体验。
开发与扩展性
项目结构清晰,代码注释详尽,便于开发者进行二次开发和功能扩展。用户可以根据需要自定义机械臂型号,增加了系统的灵活性和适应性,适合不同的应用需求。
延伸问答
这个3D仿真系统支持哪些功能?
该系统支持手动关节控制、自动目标到达、关节调试可视化,以及正逆运动学计算。
如何实现逆运动学计算?
逆运动学计算基于梯度下降法,通过优化算法自动求解到达指定目标点所需的关节角度。
这个仿真系统使用了哪些技术栈?
该系统使用了.NET 8.0、WPF和HelixToolkit,推荐使用Visual Studio 2022进行开发。
如何实时调整机械臂的关节角度?
用户可以通过滑块实时调整每个关节的角度,机械臂姿态会即时更新。
该系统支持哪些型号的工业机械臂?
系统支持两种ABB工业机械臂型号:IRB 4600和IRB 6700。
如何安装和运行这个3D仿真项目?
用户需安装.NET 8 SDK,克隆项目或下载ZIP,恢复依赖,编译并运行程序。
