
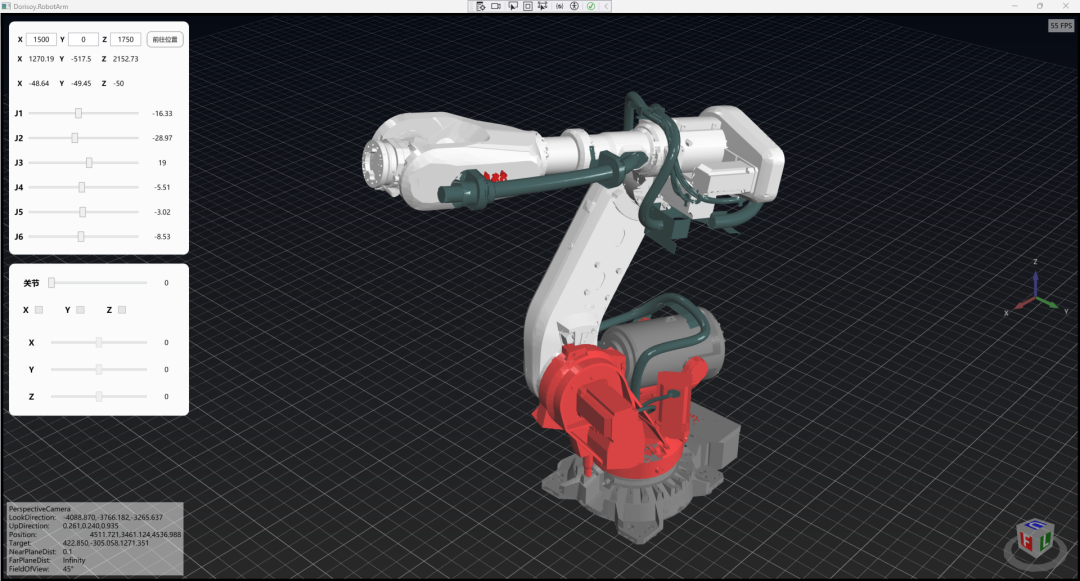
.NET 8 + WPF 做工业机器人3D仿真?HelixToolkit 真香
dotNET跨平台
·

游戏中的数学 (6) - 运动学基础
土法炼钢兴趣小组的博客
·

自闭症中的心理运动学可以教给开发者什么
DEV Community
·

如何通过EtherCAT运动控制器控制Delta机器人手臂?
DEV Community
·
