
工业机器人轨迹怎么来?这个 C# 工具从 DXF 自动生成
内容提要
本文介绍了一款轻量级的DXF路径编辑器,旨在高效将CAD图纸转化为机器人运动路径。该工具基于C#和Windows Forms开发,支持DXF文件解析和CSV格式路径生成,适用于工业机器人。具备2D/3D可视化、路径编辑和动画播放功能,界面简洁易用,已成功应用于爱普生机械臂。项目开源,适合学习和二次开发。
关键要点
-
工业自动化日益普及,CAD图纸转化为机器人运动路径成为关键环节。
-
推荐一款轻量级DXF路径编辑器,解决从图到动的核心问题。
-
DXF路径编辑器基于C#和Windows Forms开发,支持DXF文件解析和CSV路径生成。
-
项目整合netDxf库和OpenTK图形引擎,实现2D/3D可视化和完整工作流。
-
支持导入标准DXF文件,自动识别并提取基本二维图形元素。
-
提供2D视图和3D模拟环境,支持路径动画播放和基础路径编辑能力。
-
项目特点适用于点胶、涂布、激光切割等机器人应用,界面简洁易用。
-
完全开源,代码模块化,适合学习和二次开发。
-
开发平台基于.NET Framework 4.5,使用开源库netDxf解析DXF文件。
-
3D渲染采用OpenTK,确保轻量级但功能完整的三维场景绘制。
-
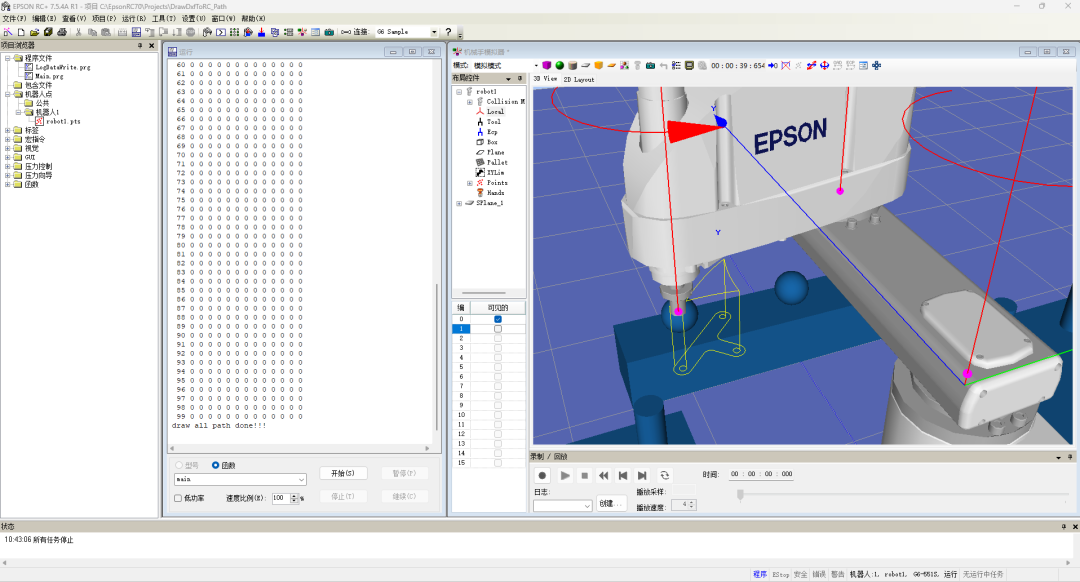
工具与爱普生机械臂配合良好,验证了工具的可靠性与实用性。
-
项目已开源,包含完整工程文件和示例,支持功能扩展。
延伸解读
工业机器人应用前景
随着工业自动化的普及,CAD图纸转化为机器人运动路径的需求日益增加。该DXF路径编辑器工具的推出,能够有效降低小型产线和创客项目在路径生成中的时间和错误率,提升生产效率。
开源项目的优势
该工具完全开源,代码模块化,适合学习和二次开发。开发者可以根据自身需求进行功能扩展,如增加对更多DXF实体类型的支持,或是生成G代码,增强工具的适用性。
用户友好的设计
DXF路径编辑器的界面简洁直观,普通工程师和学生均可快速上手。其2D/3D可视化功能不仅便于设计验证,还能帮助用户评估执行的可行性,降低了使用门槛。
延伸问答
这款DXF路径编辑器的主要功能是什么?
该编辑器主要功能是解析DXF格式的CAD文件,并将几何路径数据转换为结构化的坐标序列,最终导出为CSV文件供工业机器人使用。
这个工具是用什么技术开发的?
该工具基于C#和Windows Forms开发,使用开源库netDxf解析DXF文件,并通过OpenTK实现3D渲染。
DXF路径编辑器适合哪些工业应用?
该编辑器特别适用于点胶、涂布、激光切割和轨迹绘制等机器人应用。
如何使用这个工具生成机器人运动路径?
用户只需将CAD图形导出为DXF,经软件处理后生成CSV路径文件,再导入机器人仿真环境即可。
这个工具的界面设计如何?
工具界面简洁直观,没有复杂参数设置,普通工程师或学生也能快速上手。
该项目是否开源?
是的,该项目完全开源,包含完整工程文件和示例,适合学习和二次开发。
