
重叠社区检测
内容提要
同构图与异构图的主要区别在于,异构图更能反映实际情况。本文介绍了几种重叠社区检测算法,包括LinkComm、CPM、SLPA和LEMON,分析了它们的优缺点及适用场景。
关键要点
-
同构图与异构图的主要区别在于,异构图更能反映实际情况。
-
异构图中同一个节点可能属于不同的社区,需要使用重叠社区检测算法。
-
LinkComm是边划分方法的代表,以边为基本元素进行社区划分。
-
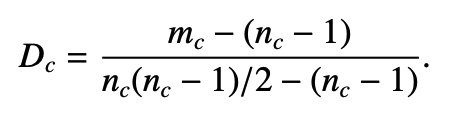
LinkComm的社团密度定义为(社区实际的边数 - 要连通的基本边数) / (全连接社区边数 - 基本边数)。
-
CPM是Clique Percolation类方法的代表,包含寻找完全子图和判断社团归属两个步骤。
-
CPM的超参k由人工设置,社团划分结果依赖该值,适用于联通子图较多的场景。
-
SLPA算法通过邻居节点的标签迭代赋值,直到标签稳定。
-
LEMON是种子扩张类算法,用于扩充已知社区的其他节点,适合做扩召回。
-
不同算法的优缺点和适用场景各异,需根据实际情况选择合适的算法。
延伸解读
异构图的优势与应用
异构图相比同构图更能真实反映复杂网络中的多样性,尤其在社区检测中,节点可以同时属于多个社区。这种特性使得异构图在社交网络、推荐系统等领域具有更广泛的应用潜力。选择合适的重叠社区检测算法可以有效提升分析的准确性和实用性。
算法选择的关键因素
不同的重叠社区检测算法各有优缺点,选择时需考虑数据特性和实际需求。例如,CPM算法依赖于超参数k的设置,适合联通子图较多的情况,而SLPA算法则适合需要高精度标签传播的场景。了解每种算法的适用条件有助于优化社区检测效果。
重叠社区检测的挑战
重叠社区检测面临的主要挑战包括算法的复杂度和收敛性问题。SLPA算法虽然精度高,但初始化时每个节点的标签不同可能导致收敛困难。研究者在应用这些算法时需关注其计算成本和适用场景,以避免不必要的资源浪费。
延伸问答
重叠社区检测算法的主要类型有哪些?
主要有LinkComm、CPM、SLPA和LEMON四种算法。
LinkComm算法的基本原理是什么?
LinkComm是边划分方法,以边为基本元素进行社区划分,社团密度通过边的合并来优化。
CPM算法的超参数k有什么影响?
超参数k由人工设置,社团划分结果依赖该值,适用于联通子图较多的场景。
SLPA算法的迭代过程是怎样的?
SLPA算法通过邻居节点的标签迭代赋值,直到标签稳定,每个节点保留占比高的标签作为其社团标签。
LEMON算法的主要用途是什么?
LEMON算法用于扩充已知社区的其他节点,适合做扩召回。
异构图与同构图的主要区别是什么?
异构图能更好地反映实际情况,允许同一节点属于不同社区,而同构图则要求每个节点类型相同。
