
低复杂度降噪技术:助力扫地机器人实现高效实时语音处理
内容提要
韩国庆北国立大学与LG电子合作开发了一种低复杂度噪声抑制方法,提升扫地机器人在低信噪比环境下的语音提取性能。该方法采用创新的噪声估计模型和启发式降噪算法,实现实时处理,适用于资源受限设备,未来可扩展至其他领域。
关键要点
-
韩国庆北国立大学与LG电子合作开发低复杂度噪声抑制方法。
-
该方法提升扫地机器人在低信噪比环境下的语音提取性能。
-
采用创新的噪声估计模型和启发式降噪算法,实现实时处理。
-
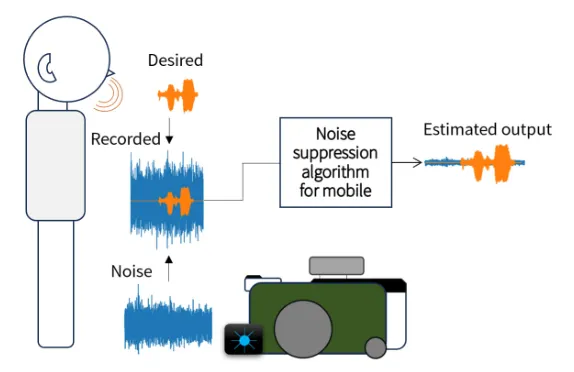
研究团队将低信噪比下的语音提取问题转化为高信噪比的噪声估计问题。
-
构建多样化的数据集以模拟真实场景,确保模型在复杂环境中的稳定性。
-
算法设计包含两个关键阶段:噪声估计和掩码优化。
-
神经网络架构经过精简,减少约25%模型规模,性能损失微小。
-
实验结果显示该方法在极低信噪比下仍能保持稳定性能。
-
模型在不同环境中表现出较强的鲁棒性,避免生成虚假语音信号。
-
计算效率高,满足扫地机器人的实时处理需求。
-
研究成果可扩展至其他资源受限设备的噪声抑制任务。
-
未来计划将该方法扩展至语音活动检测、声音事件识别等领域。
延伸解读
技术背景与应用场景
扫地机器人在家庭环境中常面临高强度噪声的挑战,尤其是在低信噪比的情况下,语音识别的准确性大幅下降。此次研究通过低复杂度噪声抑制技术,显著提升了扫地机器人在复杂环境中的语音提取能力,为智能家居设备的语音交互提供了更为可靠的解决方案。
算法设计的创新性
该研究的噪声抑制方法通过将低信噪比下的语音提取问题转化为高信噪比的噪声估计问题,展现了算法设计的创新性。通过简化神经网络架构,减少计算复杂度,使得该技术能够在资源受限的设备上高效运行,具有广泛的应用潜力。
未来发展方向
研究团队计划将此低复杂度噪声抑制方法扩展至语音活动检测和声音事件识别等领域。这一发展方向不仅能提升扫地机器人的语音交互能力,还可能为其他智能设备的噪声处理提供新的思路,推动智能家居技术的进一步发展。
延伸问答
低复杂度噪声抑制方法的主要优势是什么?
该方法在低信噪比环境下有效提升扫地机器人的语音提取性能,同时具备实时处理能力,适用于资源受限设备。
研究团队如何解决低信噪比下的语音提取问题?
研究团队将低信噪比下的语音提取问题转化为高信噪比的噪声估计问题,通过训练神经网络专注于估计噪声的幅度谱。
该噪声抑制方法的算法设计包含哪些关键阶段?
算法设计包含噪声估计和掩码优化两个关键阶段,首先估计噪声幅度,然后优化掩码以提取目标语音。
实验结果显示该方法在低信噪比下的表现如何?
在-10 dB信噪比下,该方法的SI-SDR提升9.73 dB,SDR提升11.30 dB,性能接近计算量更大的模型,且在-18 dB环境下仍保持稳定。
该技术的计算效率如何?
该模型在Qualcomm Robotics RB5移动处理器上的推理时间仅为0.06秒,实时因子低至0.0014,满足扫地机器人的实时处理需求。
未来该技术的扩展计划是什么?
研究团队计划将该方法扩展至语音活动检测、声音事件识别等领域,并进一步优化掩码估计的理论基础。
